

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 1<br />
INTRODUCTION<br />
The introduction <strong>of</strong> industrial robots was the beginning <strong>of</strong> a new era in many fields,<br />
especially in manufacturing industry. Eventually, the serial manipulators became an<br />
invaluable tool for a broad range <strong>of</strong> applications. As the science <strong>of</strong> machine <strong>and</strong> mechanisms<br />
develop <strong>and</strong> the need for higher precision, robustness, stiffness <strong>and</strong> load-carrying capacity<br />
arise, the parallel manipulators begin to show up.<br />
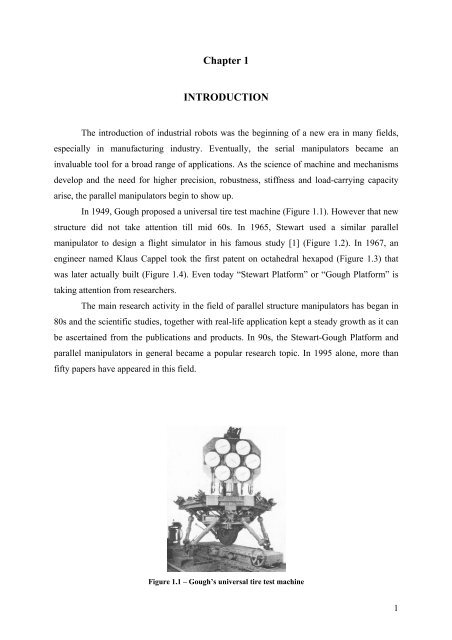
In 1949, Gough proposed a universal tire test machine (Figure 1.1). However that new<br />
structure did not take attention till mid 60s. In 1965, Stewart used a similar parallel<br />
manipulator to design a flight simulator in his famous study [1] (Figure 1.2). In 1967, an<br />
engineer named Klaus Cappel took the first patent on octahedral hexapod (Figure 1.3) that<br />
was later actually built (Figure 1.4). Even today “Stewart Platform” or “Gough Platform” is<br />
taking attention from researchers.<br />
The main research activity in the field <strong>of</strong> parallel structure manipulators has began in<br />
80s <strong>and</strong> the scientific studies, together with real-life application kept a steady growth as it can<br />
be ascertained from the publications <strong>and</strong> products. In 90s, the Stewart-Gough Platform <strong>and</strong><br />
parallel manipulators in general became a popular research topic. In 1995 alone, more than<br />
fifty papers have appeared in this field.<br />
Figure 1.1 – Gough’s universal tire test machine<br />
1













