

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
∑ƒi 6 5 4 3<br />
l 2 3 4 5 6 2 3 4 5 2 3 4 3<br />
non-symmetrical<br />
branches<br />
1 18 64 68 23 2 14 31 16 5 14 10 6<br />
symmetrical<br />
branches<br />
0 14 58 62 19 2 10 31 10 3 11 5 2<br />
in all 1 32 122 130 42 4 24 62 26 8 25 15 8<br />
pi<br />
p3-p3<br />
p1-p2-p3<br />
p2-p2-p2<br />
p1-p1-p1-p3<br />
3.3.3 Modular Parallel Manipulators<br />
p1-p1-p2-p2<br />
p1-p1-p1-p1-p2<br />
p1-p1-p1-p1-p1-p1<br />
p3-p2<br />
p1-p2-p2<br />
Table 3.1 – Possible set <strong>of</strong> main branches<br />
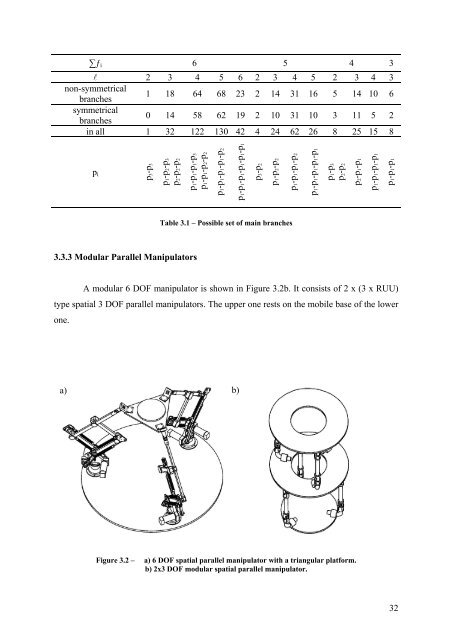
A modular 6 DOF manipulator is shown in Figure 3.2b. It consists <strong>of</strong> 2 x (3 x RUU)<br />
type spatial 3 DOF parallel manipulators. The upper one rests on the mobile base <strong>of</strong> the lower<br />
one.<br />
a) b)<br />
Figure 3.2 – a) 6 DOF spatial parallel manipulator with a triangular platform.<br />
b) 2x3 DOF modular spatial parallel manipulator.<br />
p1-p1-p1-p2<br />
p1-p1-p1-p1-p1<br />
p1-p3<br />
p2-p2<br />
p2-p1-p1<br />
p1-p1-p1-p1<br />
p1-p1-p1<br />
32













