

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Platform Position (mm)<br />
Platform Orientation (deg)<br />
1000<br />
500<br />
0<br />
-500<br />
-1000<br />
-1500<br />
-2000<br />
150<br />
100<br />
-50<br />
-100<br />
X Position<br />
Y Position<br />
Z Position<br />
0 6 12 18 24 30 36 42 48 54 60 66 72 78 84 90<br />
Input Motor Angles (mm)<br />
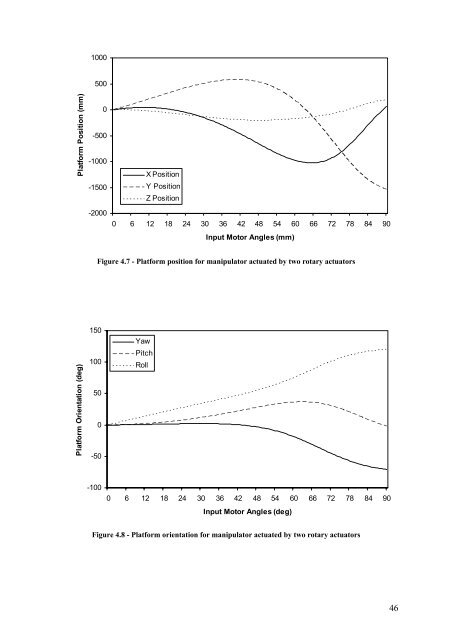
Figure 4.7 - Platform position for manipulator actuated by two rotary actuators<br />
50<br />
0<br />
Yaw<br />
Pitch<br />
Roll<br />
0 6 12 18 24 30 36 42 48 54 60 66 72 78 84 90<br />
Input Motor Angles (deg)<br />
Figure 4.8 - Platform orientation for manipulator actuated by two rotary actuators<br />
46













