

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
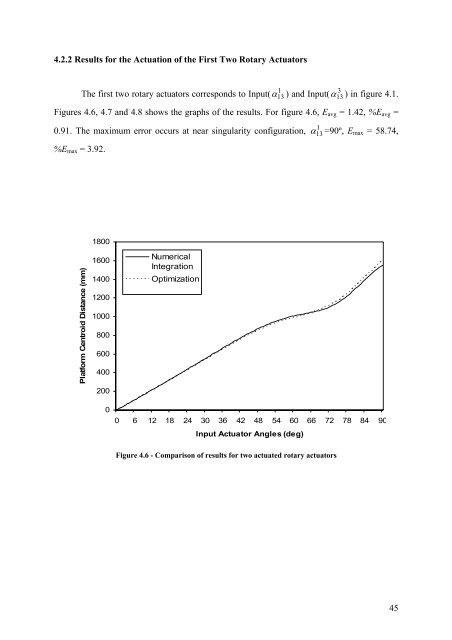
4.2.2 Results for the Actuation <strong>of</strong> the First Two Rotary Actuators<br />
The first two rotary actuators corresponds to Input( α ) <strong>and</strong> Input( α ) in figure 4.1.<br />
Figures 4.6, 4.7 <strong>and</strong> 4.8 shows the graphs <strong>of</strong> the results. For figure 4.6, Eavg = 1.42, %Eavg =<br />
0.91. The maximum error occurs at near singularity configuration,<br />
%Emax = 3.92.<br />
Platform Centroid Distance (mm)<br />
1800<br />
1600<br />
1400<br />
1200<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
Numerical<br />
Integration<br />
Optimization<br />
1<br />
13<br />
3<br />
13<br />
1<br />
α 13 =90º, Emax = 58.74,<br />
0 6 12 18 24 30 36 42 48 54 60 66 72 78 84 90<br />
Input Actuator Angles (deg)<br />
Figure 4.6 - Comparison <strong>of</strong> results for two actuated rotary actuators<br />
45













