

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Platform Position (mm)<br />
Platform Orientation (deg)<br />
1200<br />
1000<br />
800<br />
600<br />
400<br />
200<br />
0<br />
-200<br />
-400<br />
-600<br />
-800<br />
30<br />
20<br />
10<br />
0<br />
-10<br />
-20<br />
-30<br />
-40<br />
X Position<br />
Y Position<br />
Z Position<br />
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750<br />
Input Actuator Displacements (mm)<br />
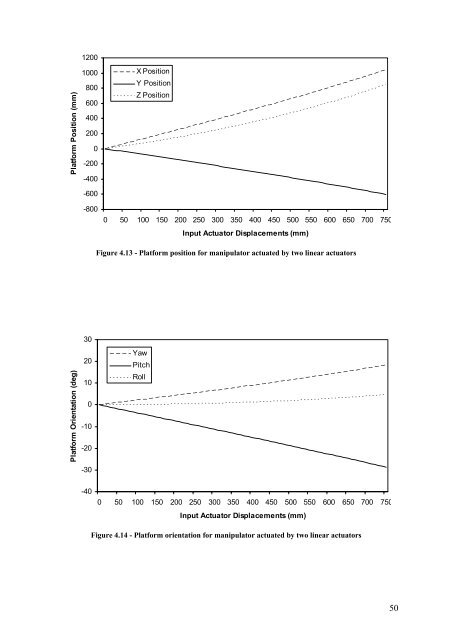
Figure 4.13 - Platform position for manipulator actuated by two linear actuators<br />
Yaw<br />
Pitch<br />
Roll<br />
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750<br />
Input Actuator Displacements (mm)<br />
Figure 4.14 - Platform orientation for manipulator actuated by two linear actuators<br />
50













