

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
PP := L1 ← 0<br />
M1 ← 0<br />
N1 ← 1<br />
L2 ← cv M2 ← sv N2 ← 0<br />
P1 ← sv ⋅ rv Q1 ← −cv ⋅ rv R1 ← 0<br />
P2 ← 0<br />
Q2 ← 0<br />
R2 ← 0<br />
a1 ← 0<br />
a2 ← 0<br />
a3 ← 0<br />
a4 ← 0<br />
a6 ← 0<br />
for k∈3.. 5<br />
PP<br />
P<br />
( ) sin( α k)<br />
( )<br />
a1k ← M k−2⋅Nk−1 − Nk−2⋅Mk−1 ⋅ + Lk−2⋅cos α k<br />
b1k ← ( Nk−2⋅Lk−1 − Lk−2⋅Nk−1) ⋅ sin( α k)<br />
+ M k−2⋅cos ( α k)<br />
c1k ← ( Lk−2⋅Mk−1 − M k−2⋅Lk−1) ⋅ sin( α k)<br />
+ Nk−2⋅cos ( α k)<br />
d1k ← ( M k−2⋅Rk−1 − R k−2⋅Mk−1 + Nk−1⋅Qk−2 − Nk−2⋅Qk−1 − ak ⋅ Lk−2) ⋅ sin( α k)<br />
+ ak ⋅ ( M k−2⋅Nk−1 − Nk−2⋅Mk−1) ⋅ Pk−2 ⋅<br />
e1k ← ( Nk−2⋅Pk−1 − Pk−2⋅Nk−1 + Lk−1⋅Rk−2 − Lk−2⋅Rk−1 − ak ⋅ M k−2) ⋅ sin( α k)<br />
+ a k ⋅ ( Nk−2⋅Lk−1 − Lk−2⋅Nk−1) ⋅ Qk−2 ⋅<br />
f1k ← ( Lk−2⋅Qk−1 − Qk−2⋅Lk−1 + M k−1⋅Pk−2 − M k−2⋅Pk−1 − ak ⋅ Nk−2) ⋅ sin( α k)<br />
+<br />
Lk ← a1k M k ← b1k Nk ← c1k Pk ← d1k Qk ← e1k R k ← f1k a k ⋅ ( Lk−2⋅Mk−1 − M k−2⋅Lk−1) ⋅ R k−2 ⋅<br />
substitute , α5 simplify<br />
collect, rv collect, sin( α3) π<br />
2<br />
→<br />
( )<br />
( )<br />
( )<br />
⎡⎣ ⎤⎦ cos α k<br />
⎡⎣ ⎤⎦ cos α k<br />
⎡⎣ ⎤⎦ cos α k<br />
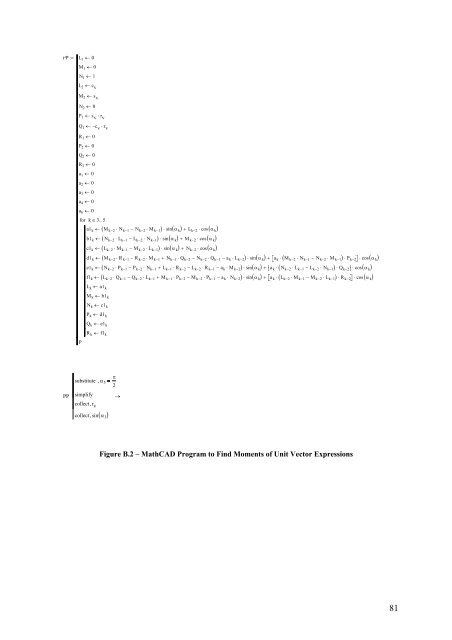
Figure B.2 – MathCAD Program to Find Moments <strong>of</strong> Unit Vector Expressions<br />
81













