

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
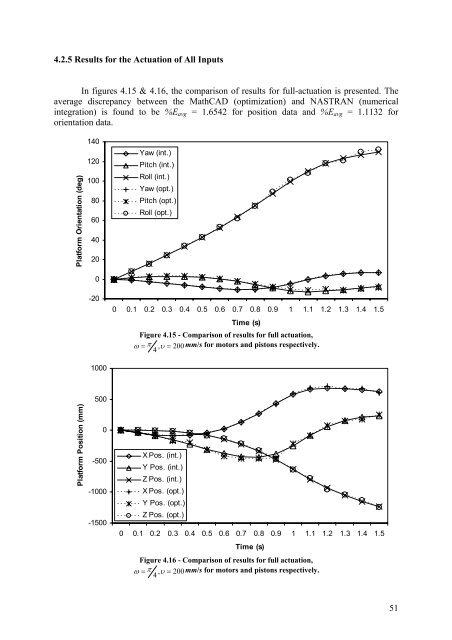
4.2.5 Results for the Actuation <strong>of</strong> All Inputs<br />
In figures 4.15 & 4.16, the comparison <strong>of</strong> results for full-actuation is presented. The<br />
average discrepancy between the MathCAD (optimization) <strong>and</strong> NASTRAN (numerical<br />
integration) is found to be %Eavg = 1.6542 for position data <strong>and</strong> %Eavg = 1.1132 for<br />
orientation data.<br />
Platform Orientation (deg)<br />
Platform Position (mm)<br />
140<br />
120<br />
100<br />
80<br />
60<br />
40<br />
20<br />
0<br />
-20<br />
1000<br />
500<br />
0<br />
-500<br />
-1000<br />
-1500<br />
Yaw (int.)<br />
Pitch (int.)<br />
Roll (int.)<br />
Yaw (opt.)<br />
Pitch (opt.)<br />
Roll (opt.)<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5<br />
Time (s)<br />
Figure 4.15 - Comparison <strong>of</strong> results for full actuation,<br />
ω = π , υ = 200 mm/s for motors <strong>and</strong> pistons respectively.<br />
4<br />
X Pos. (int.)<br />
Y Pos. (int.)<br />
Z Pos. (int.)<br />
X Pos. (opt.)<br />
Y Pos. (opt.)<br />
Z Pos. (opt.)<br />
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5<br />
Time (s)<br />
Figure 4.16 - Comparison <strong>of</strong> results for full actuation,<br />
ω = π , υ = 200mm/s<br />
for motors <strong>and</strong> pistons respectively.<br />
4<br />
51













