

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
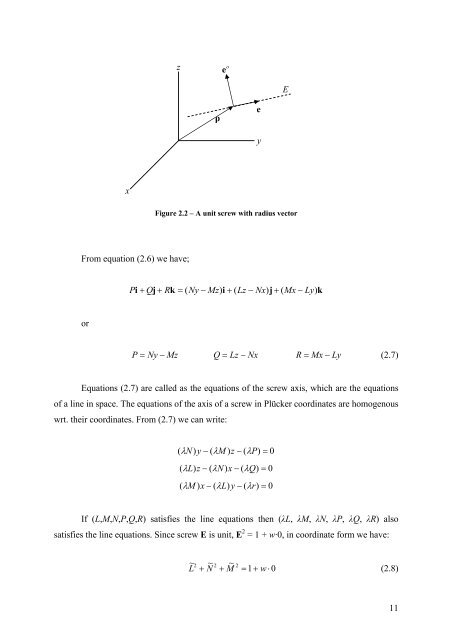
From equation (2.6) we have;<br />
or<br />
x<br />
z<br />
ρ<br />
o<br />
e<br />
Figure 2.2 – A unit screw with radius vector<br />
Pi + Qj<br />
+ Rk<br />
= ( Ny − Mz)<br />
i + ( Lz − Nx)<br />
j + ( Mx − Ly)<br />
k<br />
P = Ny − Mz Q = Lz − Nx R = Mx − Ly (2.7)<br />
Equations (2.7) are called as the equations <strong>of</strong> the screw axis, which are the equations<br />
<strong>of</strong> a line in space. The equations <strong>of</strong> the axis <strong>of</strong> a screw in Plücker coordinates are homogenous<br />
wrt. their coordinates. From (2.7) we can write:<br />
( λ N) y − ( λM<br />
) z − ( λP)<br />
= 0<br />
( λ L) z − ( λN)<br />
x − ( λQ)<br />
= 0<br />
( λ M ) x − ( λL)<br />
y − ( λr)<br />
= 0<br />
If (L,M,N,P,Q,R) satisfies the line equations then (λL, λM, λN, λP, λQ, λR) also<br />
satisfies the line equations. Since screw E is unit, E 2 = 1 + w·0, in coordinate form we have:<br />
e<br />
y<br />
E<br />
~ 2 ~ 2 ~ 2<br />
L + N + M = 1+<br />
w ⋅ 0<br />
(2.8)<br />
11













