

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 2<br />
SCREW KINEMATICS<br />
In this thesis, the tool used to derive the kinematic equations is called as the screw<br />
theory. In this chapter, the screw theory is explained in detail.<br />
2.1 Definition <strong>of</strong> a Unit Screw in Space<br />
where<br />
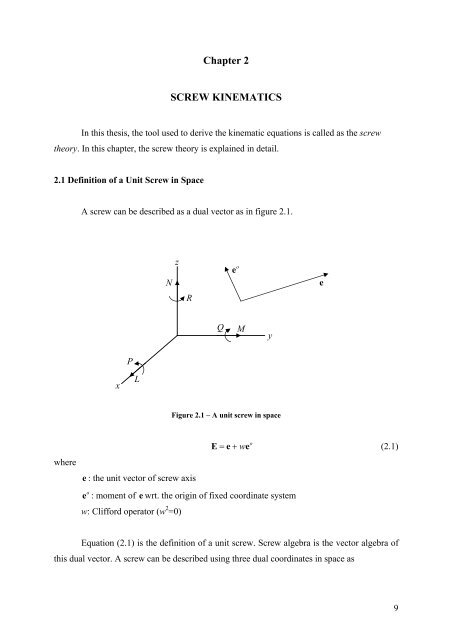
A screw can be described as a dual vector as in figure 2.1.<br />
x<br />
P<br />
L<br />
N<br />
e : the unit vector <strong>of</strong> screw axis<br />
Figure 2.1 – A unit screw in space<br />
E e +<br />
o<br />
e : moment <strong>of</strong> e wrt. the origin <strong>of</strong> fixed coordinate system<br />
w: Clifford operator (w 2 =0)<br />
z<br />
R<br />
o<br />
= we<br />
(2.1)<br />
Equation (2.1) is the definition <strong>of</strong> a unit screw. Screw algebra is the vector algebra <strong>of</strong><br />
this dual vector. A screw can be described using three dual coordinates in space as<br />
o<br />
e<br />
Q M<br />
y<br />
e<br />
9













