

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
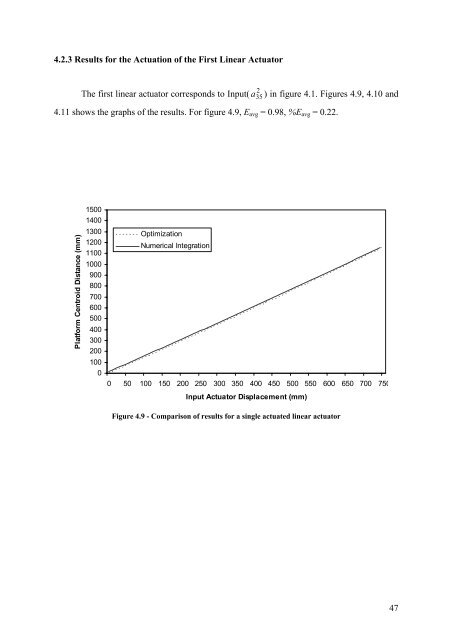
4.2.3 Results for the Actuation <strong>of</strong> the First Linear Actuator<br />
The first linear actuator corresponds to Input( a ) in figure 4.1. Figures 4.9, 4.10 <strong>and</strong><br />
4.11 shows the graphs <strong>of</strong> the results. For figure 4.9, Eavg = 0.98, %Eavg = 0.22.<br />
Platform Centroid Distance (mm)<br />
1500<br />
1400<br />
1300<br />
1200<br />
1100<br />
1000<br />
900<br />
800<br />
700<br />
600<br />
500<br />
400<br />
300<br />
200<br />
100<br />
0<br />
Optimization<br />
Numerical Integration<br />
0 50 100 150 200 250 300 350 400 450 500 550 600 650 700 750<br />
2<br />
35<br />
Input Actuator Displacement (mm)<br />
Figure 4.9 - Comparison <strong>of</strong> results for a single actuated linear actuator<br />
47













