( ( ( ) pc ( 2 s2 ) ) ) ( ) ( ) ( ( ) ) ( ) ( ) ( ) ( ) ( ) ( ( ) pc ( 3 s3 ) ) Fgn( u) := p c1, s1, r1, θ1, φ1, δ1− , , r1, θ3, φ3, δ3− Q Fgn( u) := Fgn( u) + p( c2, s2, r1, θ3, φ3, δ3) − pc ( 3, s3, r1, θ5, φ5, δ5) Fgn( u) := Fgn( u) + p( c1, s1, r1, θ1, φ1, δ1) − pc ( 3, s3, r1, θ5, φ5, δ5) Fgn( u) := Fgn( u) + p( c1, s1, r1, θ1, φ1, δ1) − pc ( 1, s1, r2, θ2, φ2, δ2) Fgn( u) := Fgn( u) + p( c2, s2, r1, θ3, φ3, δ3) − pc ( 2, s2, r2, θ4, φ4, δ4) Fgn( u) := Fgn( u) + p( c3, s3, r1, θ5, φ5, δ5) − pc ( 3, s3, r2, θ6, φ6, δ6) Fgn( u) := Fgn( u) + p( c1, s1, r2, θ2, φ2, δ2) − pc ( 2, s2, r2, θ4, φ4, δ4) Fgn( u) := Fgn( u) + p( c1, s1, r2, θ2, φ2, δ2) − pc ( 3, s3, r2, θ6, φ6, δ6) Fgn( u) := Fgn( u) + p( c3, s3, r2, θ6, φ6, δ6) − pc ( 2, s2, r2, θ4, φ4, δ4) Fgn( u) := Fgn( u) + p( c3, s3, r2, θ6, φ6, δ6) − pc ( 1, s1, r1, θ1, φ1, δ1) Fgn( u) := Fgn( u) + p( c1, s1, r2, θ2, φ2, δ2) − pc ( 2, s2, r1, θ3, φ3, δ3) − Q − Q − B − B − B − C − C − C − D − D Fgn( u) := Fgn( u) + p c2, s2, r2, θ4, φ4, δ4− , , r1, θ5, φ5, δ5− D u := ⎛ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎜ ⎝ θ 2 θ 4 θ 6 φ 1 φ 2 φ 3 φ 4 φ 5 φ 6 δ 1 δ 3 δ 5 Soln T = ⎞ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎟ ⎠ Kgn( u) := Fgn( u) Given u0 > 0.1 u6 > 0 u0 < π u6 < π u1 > 0.1 u7 > 0 u1 < π u7 < π u2 > 0.1 u8 > 0 u2 < π u8 < π Soln := Minimize( Kgn, u) u3 > 0 u9 > 0 u3 < π u9 < 2 u4 > 0 u10 > 0 u4 < π u10 < 2 Call routine u5 > 0 u11 > 0 u5 < π u11 < 2 84
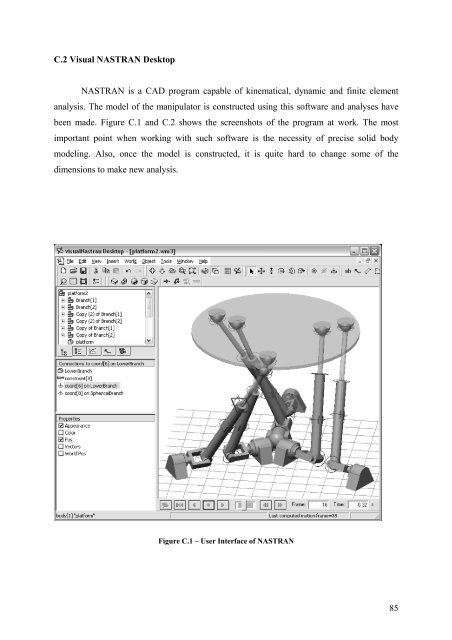
C.2 Visual NASTRAN Desktop NASTRAN is a CAD program capable <strong>of</strong> kinematical, dynamic <strong>and</strong> finite element analysis. The model <strong>of</strong> the manipulator is constructed using this s<strong>of</strong>tware <strong>and</strong> analyses have been made. Figure C.1 <strong>and</strong> C.2 shows the screenshots <strong>of</strong> the program at work. The most important point when working with such s<strong>of</strong>tware is the necessity <strong>of</strong> precise solid body modeling. Also, once the model is constructed, it is quite hard to change some <strong>of</strong> the dimensions to make new analysis. Figure C.1 – User Interface <strong>of</strong> NASTRAN 85
- Page 1 and 2:
Kinematic and Dynamic Analysis of S
- Page 3 and 4:
Research is what I'm doing when I d
- Page 5 and 6:
ÖZ Bu tez yeni bir tip uzaysal alt
- Page 7 and 8:
Chapter 4 KINEMATIC ANALYSIS ......
- Page 9 and 10:
Figure 4.15 - Comparison of results
- Page 11 and 12:
Chapter 1 INTRODUCTION The introduc
- Page 13 and 14:
Figure 1.4 - The first flight simul
- Page 15 and 16:
Generally, the actuators of a seria
- Page 17 and 18:
−1 where J = J q J x . . . q = J
- Page 19 and 20:
Chapter 2 SCREW KINEMATICS In this
- Page 21 and 22:
From equation (2.6) we have; or x z
- Page 23 and 24:
Using (2.7) and (2.12), one can fin
- Page 25 and 26:
LP + MQ + NR = 0 L 1 2 2 + M 2 1 LP
- Page 27 and 28:
Following Crammer’s method, the u
- Page 29 and 30:
That’s, the variable angle α ki
- Page 31 and 32:
~ ~ ~ ~ ~ ~ Let Ei ( Li , M i, Ni )
- Page 33 and 34:
Qk = (NiPj + LjRi - LiRj - NjPi - a
- Page 35 and 36:
The methods reported by F. Freudens
- Page 37 and 38:
Using equations (3.4) and (3.6), we
- Page 39 and 40:
Order of a structural group is the
- Page 41 and 42:
3.3 Geometrical Structural Synthesi
- Page 43 and 44: 3.4 Kinematic Structural Synthesis
- Page 45 and 46: Let’s consider a 5 DOF parallel m
- Page 47 and 48: Chapter 4 KINEMATIC ANALYSIS Kinema
- Page 49 and 50: Figure 4.1 - The six degree of free
- Page 51 and 52: v v v P4 = yv N 4 − zv M 4 v v v
- Page 53 and 54: The best way of visualizing the dis
- Page 55 and 56: 4.2.2 Results for the Actuation of
- Page 57 and 58: 4.2.3 Results for the Actuation of
- Page 59 and 60: 4.2.4 Results for the Actuation of
- Page 61 and 62: 4.2.5 Results for the Actuation of
- Page 63 and 64: Figure 4.17 - Corresponding piston
- Page 65 and 66: Chapter 5 DYNAMIC ANALYSIS Dynamics
- Page 67 and 68: Thus, according to Lagrange, the re
- Page 69 and 70: J is the 6x6 Jacobian matrix that
- Page 71 and 72: Chapter 6 DISCUSSION AND CONCLUSION
- Page 73 and 74: REFERENCES [1] D. Stewart, A platfo
- Page 75 and 76: [19] Seung-Bok Choi, Dong-Won Park,
- Page 77 and 78: [38] Kotelnikov A. P., Screw calcul
- Page 79 and 80: [60] R. I. Alizade, Investigation o
- Page 81 and 82: A.1.1 CASSoM Source Code Like all v
- Page 83 and 84: in the 'Input Parameters' section.
- Page 85 and 86: pty:=roy+dy; ptz:=roz+dz; end; func
- Page 87 and 88: Figure A.2 - a Screenshot of iMIDAS
- Page 89 and 90: APPENDIX B RECURSIVE SYMBOLIC CALCU
- Page 91 and 92: PP := L1 ← 0 M1 ← 0 N1 ← 1 L2
- Page 93: Preleminary function definitions In