

Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...
Kinematic and Dynamic Analysis of Spatial Six Degree of Freedom ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
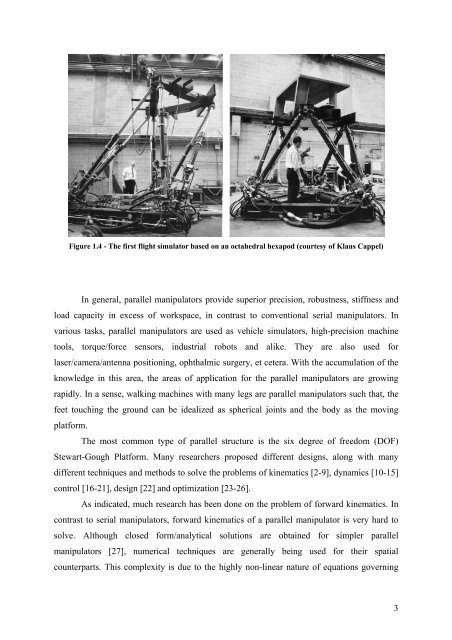
Figure 1.4 - The first flight simulator based on an octahedral hexapod (courtesy <strong>of</strong> Klaus Cappel)<br />
In general, parallel manipulators provide superior precision, robustness, stiffness <strong>and</strong><br />
load capacity in excess <strong>of</strong> workspace, in contrast to conventional serial manipulators. In<br />
various tasks, parallel manipulators are used as vehicle simulators, high-precision machine<br />
tools, torque/force sensors, industrial robots <strong>and</strong> alike. They are also used for<br />
laser/camera/antenna positioning, ophthalmic surgery, et cetera. With the accumulation <strong>of</strong> the<br />
knowledge in this area, the areas <strong>of</strong> application for the parallel manipulators are growing<br />
rapidly. In a sense, walking machines with many legs are parallel manipulators such that, the<br />
feet touching the ground can be idealized as spherical joints <strong>and</strong> the body as the moving<br />
platform.<br />
The most common type <strong>of</strong> parallel structure is the six degree <strong>of</strong> freedom (DOF)<br />
Stewart-Gough Platform. Many researchers proposed different designs, along with many<br />
different techniques <strong>and</strong> methods to solve the problems <strong>of</strong> kinematics [2-9], dynamics [10-15]<br />
control [16-21], design [22] <strong>and</strong> optimization [23-26].<br />
As indicated, much research has been done on the problem <strong>of</strong> forward kinematics. In<br />
contrast to serial manipulators, forward kinematics <strong>of</strong> a parallel manipulator is very hard to<br />
solve. Although closed form/analytical solutions are obtained for simpler parallel<br />
manipulators [27], numerical techniques are generally being used for their spatial<br />
counterparts. This complexity is due to the highly non-linear nature <strong>of</strong> equations governing<br />
3













