Ergonomics - Atlas Copco
Ergonomics - Atlas Copco
Ergonomics - Atlas Copco

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Evaluation of<br />
shock reaction<br />
There are no standards for the evaluation<br />
of shock reaction. The standard ISO 6544<br />
describes a procedure for measuring the<br />
impulse from a machine with the handle<br />
supported. Current knowledge cannot tell<br />
us how many shocks an operator can be<br />
exposed to before they pose a risk.<br />
As mentioned earlier, the shock reaction<br />
depends on the impulse entering the machine<br />
during the tightening sequence. Since every<br />
tool has a torque range, the shock reaction<br />
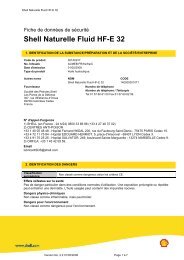
Torque (Nm)<br />
M T<br />
t u<br />
t d<br />
Time (s)<br />
Fig. 3.12 A typical tightening sequence. The area<br />
under the curve represents the impulse.<br />
lm<br />
will vary with the torque setting, for the same<br />
joint characteristics. The subjective perception<br />
of the torque reaction will also vary according<br />
to the work posture. The evaluation proce-<br />
dures must be very simple to be practical.<br />
We suggest that the scaling factor is directly<br />
proportional to the impulse measured in<br />
accordance with ISO 6544 for the hard joint.<br />
In most cases, the soft joint used in the<br />
standard gives a tightening time in excess<br />
of 300 ms and, according to our definition,<br />
this is not a shock.<br />
The other reason for selecting the hard<br />
joint is that requests for information about<br />
impulses from tools working on this joint<br />
are received from time to time, particularly<br />
from the automotive industry. Many manu-<br />
facturers and users have access to this joint<br />
and can perform measurements. In other<br />
words, there are data available.<br />
At the beginning of this chapter it was<br />
mentioned that the operator’s perception of<br />
the shock will be worse when the joint gets<br />
softer, and for medium-soft joints his or her<br />
perception will be more positive again.<br />
Using the hard joint we will be unable to<br />
find the worst joint for each torque setting.<br />
However, when comparing different<br />
tools at different joints, the one with the<br />
lowest impulse will always be preferred.<br />
Three functions are used to evaluate the<br />
101