- Page 2:
This page intentionally left blank
- Page 8:
The Cambridge Handbook of Physics F
- Page 12:
Contents Preface page vii How to us
- Page 16:
Preface In A Brief History of Time,
- Page 20: How to use this book The format is
- Page 26: 4 Units, constants, and conversions
- Page 30: 6 Units, constants, and conversions
- Page 34: 8 Units, constants, and conversions
- Page 38: 10 Units, constants, and conversion
- Page 42: 12 Units, constants, and conversion
- Page 46: 14 Units, constants, and conversion
- Page 50: 16 Units, constants, and conversion
- Page 54: 18 Units, constants, and conversion
- Page 58: 20 Mathematics 2.2 Vectors and matr
- Page 62: 22 Mathematics Divergence Rectangul
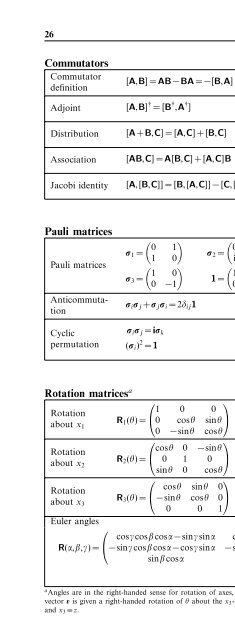
- Page 66: 24 Mathematics Matrix algebra a ⎛
- Page 72: 2.3 Series, summations, and progres
- Page 76: 2.3 Series, summations, and progres
- Page 80: 2.4 Complex variables 31 Complex an
- Page 84: 2.5 Trigonometric and hyperbolic fo
- Page 88: 2.6 Mensuration 35 Inverse hyperbol
- Page 92: 2.6 Mensuration 37 Perimeter, area,
- Page 96: 2.6 Mensuration 39 Curve measure Le
- Page 100: 2.7 Differentiation 41 Trigonometri
- Page 104: 2.7 Differentiation 43 Differential
- Page 108: 2.8 Integration 45 Trigonometric an
- Page 112: 2.9 Special functions and polynomia
- Page 116: 2.9 Special functions and polynomia
- Page 120:
2.10 Roots of quadratic and cubic e
- Page 124:
2.11 Fourier series and transforms
- Page 128:
2.12 Laplace transforms 55 2.12 Lap
- Page 132:
2.13 Probability and statistics 57
- Page 136:
2.13 Probability and statistics 59
- Page 140:
2.14 Numerical methods 61 Numerical
- Page 144:
Chapter 3 Dynamics and mechanics 3.
- Page 148:
3.2 Frames of reference 65 Momentum
- Page 152:
3.3 Gravitation 67 General relativi
- Page 156:
3.4 Particle motion 69 Reduced mass
- Page 160:
3.4 Particle motion 71 Gravitationa
- Page 164:
3.4 Particle motion 73 Inelastic co
- Page 168:
3.5 Rigid body dynamics 75 Moments
- Page 172:
3.5 Rigid body dynamics 77 Tops and
- Page 176:
3.7 Generalised dynamics 79 3.7 Gen
- Page 180:
3.8 Elasticity 81 Isotropic elastic
- Page 184:
3.8 Elasticity 83 Waves in strings
- Page 188:
3.9 Fluid dynamics 85 Viscous flow
- Page 192:
3.9 Fluid dynamics 87 Doppler effec
- Page 196:
Chapter 4 Quantum physics 4.1 Intro
- Page 200:
4.2 Quantum definitions 91 Operator
- Page 204:
4.3 Wave mechanics 93 Potential wel
- Page 208:
4.4 Hydrogenic atoms 95 Harmonic os
- Page 212:
4.4 Hydrogenic atoms 97 Orbital ang
- Page 216:
4.5 Angular momentum 99 Clebsch-Gor
- Page 220:
4.5 Angular momentum 101 Quantum pa
- Page 224:
4.7 High energy and nuclear physics
- Page 228:
Chapter 5 Thermodynamics 5.1 Introd
- Page 232:
5.2 Classical thermodynamics 107 Cy
- Page 236:
5.2 Classical thermodynamics 109 Ma
- Page 240:
5.3 Gas laws 111 Van der Waals gas
- Page 244:
5.4 Kinetic theory 113 Transport pr
- Page 248:
5.5 Statistical thermodynamics 115
- Page 252:
5.6 Fluctuations and noise 117 Nois
- Page 256:
5.7 Radiation processes 119 Photome
- Page 260:
5.7 Radiation processes 121 Blackbo
- Page 266:
124 Solid state physics 6.2 Periodi
- Page 270:
126 Solid state physics 6.3 Crystal
- Page 274:
128 Solid state physics Dislocation
- Page 278:
130 Solid state physics Debye theor
- Page 282:
132 Solid state physics 6.5 Electro
- Page 286:
134 Solid state physics Band theory
- Page 290:
136 Electromagnetism 7.2 Static fie
- Page 294:
138 Electromagnetism Electric field
- Page 298:
140 Electromagnetism Maxwell’s eq
- Page 302:
142 Electromagnetism 7.4 Fields ass
- Page 306:
144 Electromagnetism Paramagnetism
- Page 310:
146 Electromagnetism Electromagneti
- Page 314:
148 Electromagnetism Resonant LCR c
- Page 318:
150 Electromagnetism 7.7 Transmissi
- Page 322:
152 Electromagnetism 7.8 Waves in a
- Page 326:
154 Electromagnetism Reflection, re
- Page 330:
156 Electromagnetism Cherenkov radi
- Page 334:
158 Electromagnetism Magnetohydrody
- Page 338:
160 Electromagnetism Bremsstrahlung
- Page 342:
162 Optics 8.2 Interference Newton
- Page 346:
164 Optics 8.3 Fraunhofer diffracti
- Page 350:
166 Optics 8.4 Fresnel diffraction
- Page 354:
168 Optics 8.5 Geometrical optics L
- Page 358:
170 Optics 8.6 Polarisation Ellipti
- Page 362:
172 Optics 8.7 Coherence (scalar th
- Page 366:
174 Optics Lasers a R 1 R 2 r 1 r 2
- Page 370:
176 Astrophysics 9.2 Solar system d
- Page 374:
178 Astrophysics Ecliptic coordinat
- Page 378:
180 Astrophysics Planetary bodies B
- Page 382:
182 Astrophysics Stellar fusion pro
- Page 386:
184 Astrophysics 9.6 Cosmology Cosm
- Page 392:
Index Section headings are shown in
- Page 396:
Index 189 and Johnson noise [5.141]
- Page 400:
Index 191 to mass ratio of electron
- Page 404:
Index 193 Coulomb logarithm [7.254]
- Page 408:
Index 195 rectangular aperture [8.3
- Page 412:
Index 197 fields, 139 wave speed [7
- Page 416:
Index 199 energy [6.73], 133 temper
- Page 420:
Index 201 temperature scale [5.1],
- Page 424:
Index 203 Schrödinger equation [4.
- Page 428:
Index 205 Lagrange’s identity [2.
- Page 432:
Index 207 wire [7.34], 138 wire loo
- Page 436:
Index 209 Numerical methods, 60 Num
- Page 440:
Index 211 energy in Lagrangian [3.2
- Page 444:
Index 213 transmission line [7.179]
- Page 448:
Index 215 solenoid finite [7.38], 1
- Page 452:
Index 217 diffusion equation [2.340
- Page 456:
Index 219 84 vorticity and potentia