

Probabilistic Performance Analysis of Fault Diagnosis Schemes
Probabilistic Performance Analysis of Fault Diagnosis Schemes
Probabilistic Performance Analysis of Fault Diagnosis Schemes

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
β<br />
∆<br />
α<br />
β<br />
∆ 1<br />
. ..<br />
∆q<br />
α<br />
(a)<br />
(b)<br />
β<br />
∆<br />
α<br />
β<br />
∆ 1<br />
. ..<br />
∆q<br />
α<br />
M<br />
M 1<br />
. ..<br />
Mq<br />
(c)<br />
z<br />
(d)<br />
z<br />
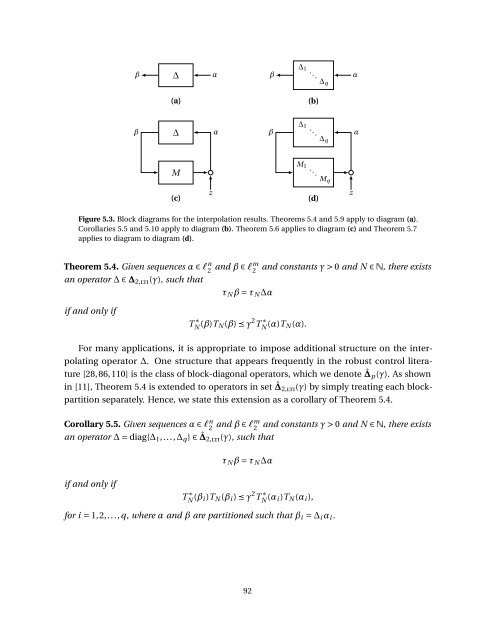
Figure 5.3. Block diagrams for the interpolation results. Theorems 5.4 and 5.9 apply to diagram (a).<br />
Corollaries 5.5 and 5.10 apply to diagram (b). Theorem 5.6 applies to diagram (c) and Theorem 5.7<br />
applies to diagram to diagram (d).<br />
Theorem 5.4. Given sequences α ∈ l n 2 and β ∈ lm 2<br />
and constants γ > 0 and N ∈ N, there exists<br />
an operator ∆ ∈ ∆ 2,lti (γ), such that<br />
τ N β = τ N ∆α<br />
if and only if<br />
T ∗ N (β)T N (β) ≼ γ 2 T ∗ N (α)T N (α).<br />
For many applications, it is appropriate to impose additional structure on the interpolating<br />
operator ∆. One structure that appears frequently in the robust control literature<br />
[28, 86, 110] is the class <strong>of</strong> block-diagonal operators, which we denote ˆ∆ p (γ). As shown<br />
in [11], Theorem 5.4 is extended to operators in set ˆ∆ 2,lti (γ) by simply treating each blockpartition<br />
separately. Hence, we state this extension as a corollary <strong>of</strong> Theorem 5.4.<br />
Corollary 5.5. Given sequences α ∈ l n 2 and β ∈ lm 2<br />
and constants γ > 0 and N ∈ N, there exists<br />
an operator ∆ = diag{∆ 1 ,...,∆ q } ∈ ˆ∆ 2,lti (γ), such that<br />
τ N β = τ N ∆α<br />
if and only if<br />
T ∗ N (β i )T N (β i ) ≼ γ 2 T ∗ N (α i )T N (α i ),<br />
for i = 1,2,..., q, where α and β are partitioned such that β i = ∆ i α i .<br />
92










