

Probabilistic Performance Analysis of Fault Diagnosis Schemes
Probabilistic Performance Analysis of Fault Diagnosis Schemes
Probabilistic Performance Analysis of Fault Diagnosis Schemes

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
[ uv1 ]<br />
w 1<br />
f 1<br />
S 1<br />
y 1<br />
[ uv2 ]<br />
w 2<br />
f 2<br />
[ uv3 ]<br />
w 3<br />
f 3<br />
S 2<br />
S 3<br />
y 2<br />
y 3<br />
y 4<br />
mux<br />
y<br />
F<br />
Voting<br />
Scheme<br />
ȳ<br />
−<br />
r<br />
δ<br />
d<br />
[ uv4 ]<br />
w 4<br />
f 4<br />
S 4<br />
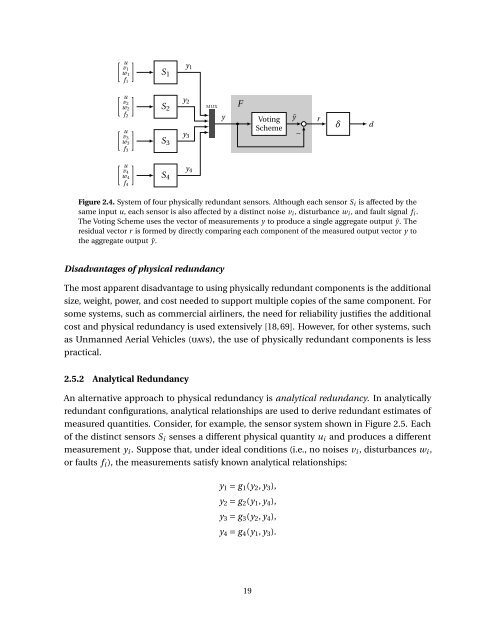
Figure 2.4. System <strong>of</strong> four physically redundant sensors. Although each sensor S i is affected by the<br />
same input u, each sensor is also affected by a distinct noise v i , disturbance w i , and fault signal f i .<br />
The Voting Scheme uses the vector <strong>of</strong> measurements y to produce a single aggregate output ȳ. The<br />
residual vector r is formed by directly comparing each component <strong>of</strong> the measured output vector y to<br />
the aggregate output ȳ.<br />
Disadvantages <strong>of</strong> physical redundancy<br />
The most apparent disadvantage to using physically redundant components is the additional<br />
size, weight, power, and cost needed to support multiple copies <strong>of</strong> the same component. For<br />
some systems, such as commercial airliners, the need for reliability justifies the additional<br />
cost and physical redundancy is used extensively [18, 69]. However, for other systems, such<br />
as Unmanned Aerial Vehicles (uavs), the use <strong>of</strong> physically redundant components is less<br />
practical.<br />
2.5.2 Analytical Redundancy<br />
An alternative approach to physical redundancy is analytical redundancy. In analytically<br />
redundant configurations, analytical relationships are used to derive redundant estimates <strong>of</strong><br />
measured quantities. Consider, for example, the sensor system shown in Figure 2.5. Each<br />
<strong>of</strong> the distinct sensors S i senses a different physical quantity u i and produces a different<br />
measurement y i . Suppose that, under ideal conditions (i.e., no noises v i , disturbances w i ,<br />
or faults f i ), the measurements satisfy known analytical relationships:<br />
y 1 = g 1 (y 2 , y 3 ),<br />
y 2 = g 2 (y 1 , y 4 ),<br />
y 3 = g 3 (y 2 , y 4 ),<br />
y 4 = g 4 (y 1 , y 3 ).<br />
19










