

Probabilistic Performance Analysis of Fault Diagnosis Schemes
Probabilistic Performance Analysis of Fault Diagnosis Schemes
Probabilistic Performance Analysis of Fault Diagnosis Schemes

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
v<br />
w<br />
u<br />
G θ<br />
y<br />
F<br />
r<br />
δ<br />
V<br />
d<br />
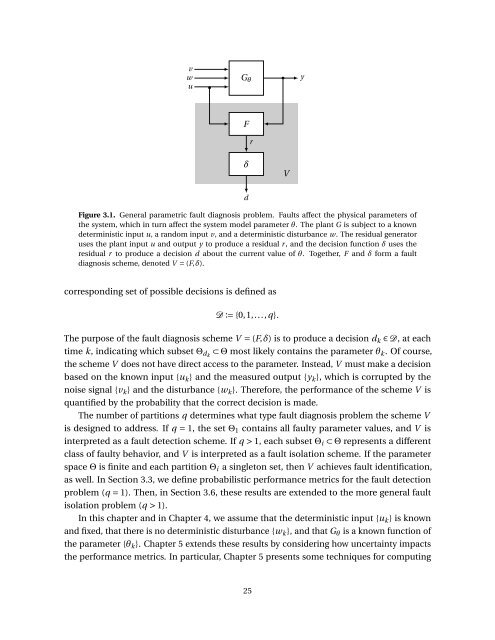
Figure 3.1. General parametric fault diagnosis problem. <strong>Fault</strong>s affect the physical parameters <strong>of</strong><br />
the system, which in turn affect the system model parameter θ. The plant G is subject to a known<br />
deterministic input u, a random input v, and a deterministic disturbance w. The residual generator<br />
uses the plant input u and output y to produce a residual r , and the decision function δ uses the<br />
residual r to produce a decision d about the current value <strong>of</strong> θ. Together, F and δ form a fault<br />
diagnosis scheme, denoted V = (F,δ).<br />
corresponding set <strong>of</strong> possible decisions is defined as<br />
D := {0,1,..., q}.<br />
The purpose <strong>of</strong> the fault diagnosis scheme V = (F,δ) is to produce a decision d k ∈ D, at each<br />
time k, indicating which subset Θ dk ⊂ Θ most likely contains the parameter θ k . Of course,<br />
the scheme V does not have direct access to the parameter. Instead, V must make a decision<br />
based on the known input {u k } and the measured output {y k }, which is corrupted by the<br />
noise signal {v k } and the disturbance {w k }. Therefore, the performance <strong>of</strong> the scheme V is<br />
quantified by the probability that the correct decision is made.<br />
The number <strong>of</strong> partitions q determines what type fault diagnosis problem the scheme V<br />
is designed to address. If q = 1, the set Θ 1 contains all faulty parameter values, and V is<br />
interpreted as a fault detection scheme. If q > 1, each subset Θ i ⊂ Θ represents a different<br />
class <strong>of</strong> faulty behavior, and V is interpreted as a fault isolation scheme. If the parameter<br />
space Θ is finite and each partition Θ i a singleton set, then V achieves fault identification,<br />
as well. In Section 3.3, we define probabilistic performance metrics for the fault detection<br />
problem (q = 1). Then, in Section 3.6, these results are extended to the more general fault<br />
isolation problem (q > 1).<br />
In this chapter and in Chapter 4, we assume that the deterministic input {u k } is known<br />
and fixed, that there is no deterministic disturbance {w k }, and that G θ is a known function <strong>of</strong><br />
the parameter {θ k }. Chapter 5 extends these results by considering how uncertainty impacts<br />
the performance metrics. In particular, Chapter 5 presents some techniques for computing<br />
25










