Tol-O-Matic System Compatibility - Industrial and Bearing Supplies
Tol-O-Matic System Compatibility - Industrial and Bearing Supplies
Tol-O-Matic System Compatibility - Industrial and Bearing Supplies

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
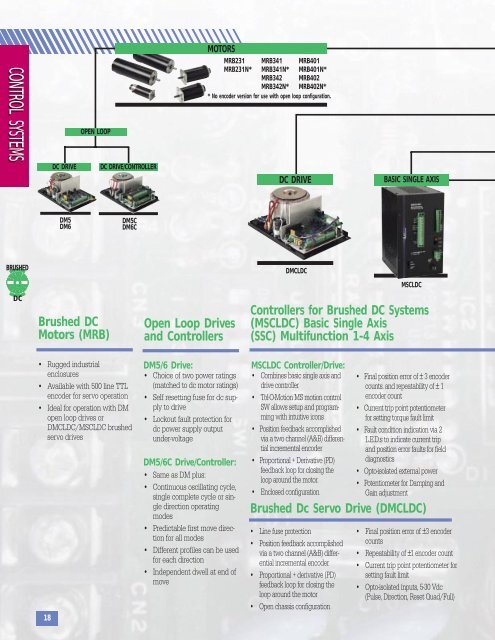
CONTROL SYSTEMS<br />
OPEN LOOP<br />
MOTORS<br />
MRB231<br />
MRB231N*<br />
MRB341<br />
MRB341N*<br />
MRB342<br />
MRB342N*<br />
MRB401<br />
MRB401N*<br />
MRB402<br />
MRB402N*<br />
* No encoder version for use with open loop configuration.<br />
DC DRIVE<br />
DC DRIVE/CONTROLLER<br />
DC DRIVE<br />
BASIC SINGLE AXIS<br />
DM5<br />
DM6<br />
DM5C<br />
DM6C<br />
DMCLDC<br />
MSCLDC<br />
Brushed DC<br />
Motors (MRB)<br />
Open Loop Drives<br />
<strong>and</strong> Controllers<br />
Controllers for Brushed DC <strong>System</strong>s<br />
(MSCLDC) Basic Single Axis<br />
(SSC) Multifunction 1-4 Axis<br />
• Rugged industrial<br />
enclosures<br />
• Available with 500 line TTL<br />
encoder for servo operation<br />
• Ideal for operation with DM<br />
open loop drives or<br />
DMCLDC/MSCLDC brushed<br />
servo drives<br />
18<br />
DM5/6 Drive:<br />
• Choice of two power ratings<br />
(matched to dc motor ratings)<br />
• Self resetting fuse for dc supply<br />
to drive<br />
• Lockout fault protection for<br />
dc power supply output<br />
under-voltage<br />
DM5/6C Drive/Controller:<br />
• Same as DM plus:<br />
• Continuous oscillating cycle,<br />
single complete cycle or single<br />
direction operating<br />
modes<br />
• Predictable first move direction<br />
for all modes<br />
• Different profiles can be used<br />
for each direction<br />
• Independent dwell at end of<br />
move<br />
MSCLDC Controller/Drive:<br />
• Combines basic single axis <strong>and</strong><br />
drive controller<br />
• <strong>Tol</strong>-O-Motion MS motion control<br />
SW allows setup <strong>and</strong> programming<br />
with intuitive icons<br />
• Position feedback accomplished<br />
via a two channel (A&B) differential<br />
incremental encoder<br />
• Proportional + Derivative (PD)<br />
feedback loop for closing the<br />
loop around the motor.<br />
• Enclosed configuration<br />
• Final position error of ± 3 encoder<br />
counts. <strong>and</strong> repeatability of ± 1<br />
encoder count<br />
• Current trip point potentiometer<br />
for setting torque fault limit<br />
• Fault condition indication via 2<br />
L.E.D.s to indicate current trip<br />
<strong>and</strong> position error faults for field<br />
diagnostics<br />
• Opto-isolated external power<br />
• Potentiometer for Damping <strong>and</strong><br />
Gain adjustment<br />
Brushed Dc Servo Drive (DMCLDC)<br />
• Line fuse protection<br />
• Position feedback accomplished<br />
via a two channel (A&B) differential<br />
incremental encoder<br />
• Proportional + derivative (PD)<br />
feedback loop for closing the<br />
loop around the motor<br />
• Open chassis configuration<br />
• Final position error of ±3 encoder<br />
counts<br />
• Repeatability of ±1 encoder count<br />
• Current trip point potentiometer for<br />
setting fault limit<br />
• Opto-isolated inputs, 5-30 Vdc<br />
(Pulse, Direction, Reset Quad/Full)