Tol-O-Matic System Compatibility - Industrial and Bearing Supplies
Tol-O-Matic System Compatibility - Industrial and Bearing Supplies
Tol-O-Matic System Compatibility - Industrial and Bearing Supplies

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
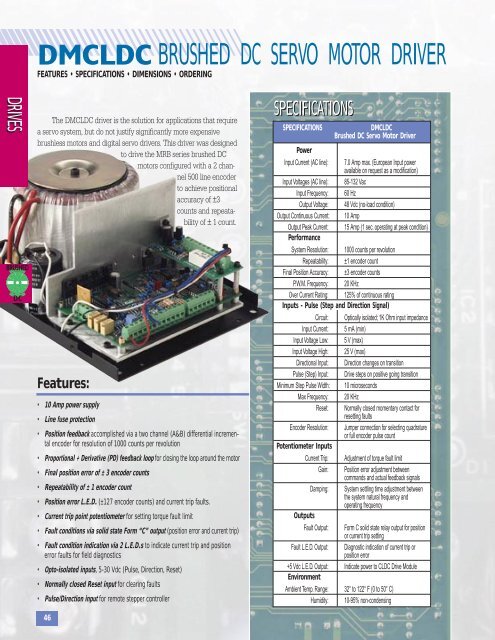
DMCLDC BRUSHED DC SERVO MOTOR DRIVER<br />
FEATURES • SPECIFICATIONS • DIMENSIONS • ORDERING<br />
DRIVES<br />
The DMCLDC driver is the solution for applications that require<br />
a servo system, but do not justify significantly more expensive<br />
brushless motors <strong>and</strong> digital servo drivers. This driver was designed<br />
to drive the MRB series brushed DC<br />
motors configured with a 2 channel<br />
500 line encoder<br />
to achieve positional<br />
accuracy of ±3<br />
counts <strong>and</strong> repeatability<br />
of ± 1 count.<br />
Features:<br />
• 10 Amp power supply<br />
• Line fuse protection<br />
• Position feedback accomplished via a two channel (A&B) differential incremental<br />
encoder for resolution of 1000 counts per revolution<br />
• Proportional + Derivative (PD) feedback loop for closing the loop around the motor<br />
• Final position error of ± 3 encoder counts<br />
• Repeatability of ± 1 encoder count<br />
• Position error L.E.D. (±127 encoder counts) <strong>and</strong> current trip faults.<br />
• Current trip point potentiometer for setting torque fault limit<br />
• Fault conditions via solid state Form “C” output (position error <strong>and</strong> current trip)<br />
• Fault condition indication via 2 L.E.D.s to indicate current trip <strong>and</strong> position<br />
error faults for field diagnostics<br />
• Opto-isolated inputs, 5-30 Vdc (Pulse, Direction, Reset)<br />
• Normally closed Reset input for clearing faults<br />
• Pulse/Direction input for remote stepper controller<br />
46<br />
SPECIFICATIONS<br />
SPECIFICATIONS<br />
DMCLDC<br />
Brushed DC Servo Motor Driver<br />
Power<br />
Input Current (AC line): 7.0 Amp max. (European Input power<br />
available on request as a modification)<br />
Input Voltages (AC line): 85-132 Vac<br />
Input Frequency: 60 Hz<br />
Output Voltage: 48 Vdc (no-load condition)<br />
Output Continuous Current: 10 Amp<br />
Output Peak Current: 15 Amp (1 sec. operating at peak condition)<br />
Performance<br />
<strong>System</strong> Resolution: 1000 counts per revolution<br />
Repeatability: ±1 encoder count<br />
Final Position Accuracy: ±3 encoder counts<br />
P.W.M. Frequency: 20 KHz<br />
Over Current Rating: 125% of continuous rating<br />
Inputs - Pulse (Step <strong>and</strong> Direction Signal)<br />
Circuit: Optically isolated; 1K Ohm input impedance<br />
Input Current: 5 mA (min)<br />
Input Voltage Low: 5 V (max)<br />
Input Voltage High: 25 V (max)<br />
Directional Input: Direction changes on transition<br />
Pulse (Step) Input: Drive steps on positive going transition<br />
Minimum Step Pulse Width: 10 microseconds<br />
Max Frequency: 20 KHz<br />
Reset: Normally closed momentary contact for<br />
resetting faults<br />
Encoder Resolution: Jumper connection for selecting quadrature<br />
or full encoder pulse count<br />
Potentiometer Inputs<br />
Current Trip: Adjustment of torque fault limit<br />
Gain: Position error adjustment between<br />
comm<strong>and</strong>s <strong>and</strong> actual feedback signals<br />
Damping: <strong>System</strong> settling time adjustment between<br />
the system natural frequency <strong>and</strong><br />
operating frequency<br />
Outputs<br />
Fault Output: Form C solid state relay output for position<br />
or current trip setting<br />
Fault L.E.D. Output: Diagnostic indication of current trip or<br />
position error<br />
+5 Vdc L.E.D. Output: Indicate power to CLDC Drive Module<br />
Environment<br />
Ambient Temp. Range: 32° to 122° F (0 to 50° C)<br />
Humidity: 10-95% non-condensing