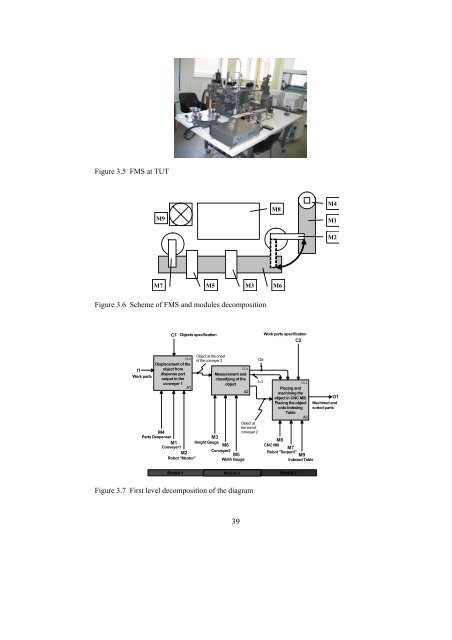
channels. Let S i denote a state (<strong>in</strong> the pattern <strong>in</strong>stant T r k) where a work piece be<strong>in</strong>gjust processed by some operation Op l accord<strong>in</strong>g to a recipe j is wait<strong>in</strong>g forprocess<strong>in</strong>g by Op i . The <strong>in</strong>teroperation states S i are used for model<strong>in</strong>g transportdelays between different locations where process<strong>in</strong>g takes place.(a)(b)Figure 3.4 Model patterns: (a) a fragment of technological process “recipe”;(b) a fragment of a mach<strong>in</strong><strong>in</strong>g unit perform<strong>in</strong>g an operationThe root model M 0 can be simplified considerably by abstraction if generalresource and performance estimation problems must be solved (analysis of phaseP2). If the global performance or resource usage are of <strong>in</strong>terest it is possible toabstract from recipe automata and <strong>in</strong>troduce <strong>in</strong>stead the so-called buffer (or storage)variables to T m models – a pair for each (observable <strong>in</strong> the model) mach<strong>in</strong><strong>in</strong>goperation. S<strong>in</strong>ce mach<strong>in</strong><strong>in</strong>g operations share their <strong>in</strong>put and output buffers thevariables model<strong>in</strong>g buffers are jo<strong>in</strong>t for several operations. Thus, the mach<strong>in</strong><strong>in</strong>gview can be constructed from <strong>in</strong>itial T m patterns us<strong>in</strong>g the follow<strong>in</strong>g rule: if tworecipe automata T r 1 and T r 2 <strong>in</strong>clude the same operation Op i , then there are buffervariables R i and R i+1 <strong>in</strong> the modified T m model such that for all operations preced<strong>in</strong>gimmediately Op i <strong>in</strong> T m their common output buffer is modeled by the variable R i ,and for all operations of T r 1 and T r 2 follow<strong>in</strong>g immediately Op i their <strong>in</strong>put buffer ismodeled by variable R i+1 . Denot<strong>in</strong>g the number of work-pieces needed for Op i by I iand the number of products or resources released after complet<strong>in</strong>g the operation byO i , the guards and assignments of transitions to and from the state Op i <strong>in</strong> T m* ( i.e.,t(.,i) and t(i,.)), are def<strong>in</strong>ed <strong>in</strong> the follow<strong>in</strong>g way: G(t xi ) ≡ R i ≥ I i , Asg(t xi ) ≡ R i – I i ;G(t ix ) ≡ RR ≥ R i+1 + O i , Asg(t ix ) ≡ R i+1 + O i (see Fig. 3.4). The mach<strong>in</strong><strong>in</strong>g viewcompletely preserves the parallelism of mach<strong>in</strong><strong>in</strong>g units and can be used forplann<strong>in</strong>g mach<strong>in</strong>e load and throughput.UppAal toolbox is one candidate for perform<strong>in</strong>g the model check<strong>in</strong>g task(Rennik, 2005). However, it uses XML files which are not comparable withcorrespond<strong>in</strong>g database <strong>format</strong>s. Therefore <strong>in</strong> practice the XML output fromdatabase is transformed us<strong>in</strong>g Python software based model converter F<strong>in</strong>ke,analysed by UppAal, and thereafter tranferred back by expert system Prolog. Thesuitable Java <strong>in</strong>terface application has been elaborated at TUT (Mäe, 2006).In FMS situated at a laboratory of TUT (Fig. 3.5), several technological devicesare <strong>in</strong>volved, <strong>in</strong>clud<strong>in</strong>g a Mill<strong>in</strong>g CNC mach<strong>in</strong>e (M8), Robot «Mentor» (M2),Robot «Serpent» (M7), Load module (M4), Height measurement device (M3),Diameter measurement device (M5), Conveyer 1 (M1), Conveyer 2 (M6), Indexedtable (M9), Operator.In Fig. 3.6 a scheme of FMS is presented, a data model (IDEF0) shown <strong>in</strong> Fig.3.7 (Karaulova, 2002, 2004) can be received after decomposition stages.38
Figure 3.5 FMS at TUTM9M8M4M1M2M7M5M3M6Figure 3.6 Scheme of FMS and modules decompositionC1 Objects specificationWork parts specificationC2I1Work partsCLADisplacement of theobject fromdispense partoutput to theconveyer 1A1M4Parts DespenserM1Conveyer1M2Robot "Mentor"Object at the onsetof the conveyer 2M3Height GaugeCLAMeasurement andclassify<strong>in</strong>g of theobjectA2M6Conveyer2M5Width GaugeObject atthe end ofconveyer 2DdLdM8CNC MillCLAPlac<strong>in</strong>g andmach<strong>in</strong><strong>in</strong>g theobject <strong>in</strong> CNC Mill.Plac<strong>in</strong>g the objectonto Index<strong>in</strong>gTableA3M7Robot "Serpent"M9Indexed TableO1Mach<strong>in</strong>ed andsorted partsModule 1 Module 2 Module 3Figure 3.7 First level decomposition of the diagram39
- Page 1 and 2: THESIS ON MECHANICAL AND INSTRUMENT
- Page 3 and 4: MASINA- JA APARAADIEHITUS E283
- Page 5 and 6: PREFACEThe mankind of the 21 st cen
- Page 7 and 8: Paper I............................
- Page 9 and 10: XII. Riives, J., Papstel, J., Otto,
- Page 11 and 12: 1. INTRODUCTION1.1. BackgroundManuf
- Page 13 and 14: database by a query; c. Search of t
- Page 15 and 16: Porter’s Diamond Model task an on
- Page 17 and 18: Figure 2.1 Use of modelling in prod
- Page 19 and 20: However, it should be noticed that
- Page 21 and 22: Figure 2.6 Depth of field/magnifica
- Page 23 and 24: 2.3. Prediction of machining accura
- Page 25 and 26: uFy=ybsinptyOl 1ulFAϕFigure 2.10 C
- Page 27 and 28: is2.5. Dynamical model with two deg
- Page 29 and 30: According to de Moivre’s formulaw
- Page 31 and 32: constant of the lathe. Figure 2.11
- Page 33 and 34: Analogically, test results and resu
- Page 35 and 36: Figure 3.1 Model checking in an ope
- Page 37: Figure 3.3 A snapshot of Uppaal mod
- Page 41 and 42: Turning and milling operations can
- Page 43 and 44: 4. MODELS FOR MONITORING THE RESOUR
- Page 45 and 46: As assumptions to solve the queries
- Page 47 and 48: Regarding co-operation networks the
- Page 49 and 50: • The system offers dynamic and u
- Page 51 and 52: Figure 4.5 Associations in the Inno
- Page 53 and 54: An enterprise-centred mapping and a
- Page 55 and 56: Better efficiency and transparency
- Page 57 and 58: institutions: in enterprises of div
- Page 59 and 60: 1. Tehnoloogiaseadme tasemel on loo
- Page 61 and 62: REFERENCESAltintas, Y. (2000). Manu
- Page 63 and 64: Russo, M.F. (1999). Automating Scie
- Page 65 and 66: Paper IIAryassov, G., Otto, T., Gro
- Page 67 and 68: Paper IVOtto, T., Papstel, J., Riiv
- Page 69 and 70: ELULOOKIRJELDUS (CV)1. IsikuandmedE
- Page 71 and 72: CURRICULUM VITAE (CV)1. Personal da
- Page 73 and 74: DISSERTATIONS DEFENDED ATTALLINN UN