

LATVIA UNIVERSITY OF AGRICULTURE - Latvijas ...
LATVIA UNIVERSITY OF AGRICULTURE - Latvijas ...
LATVIA UNIVERSITY OF AGRICULTURE - Latvijas ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
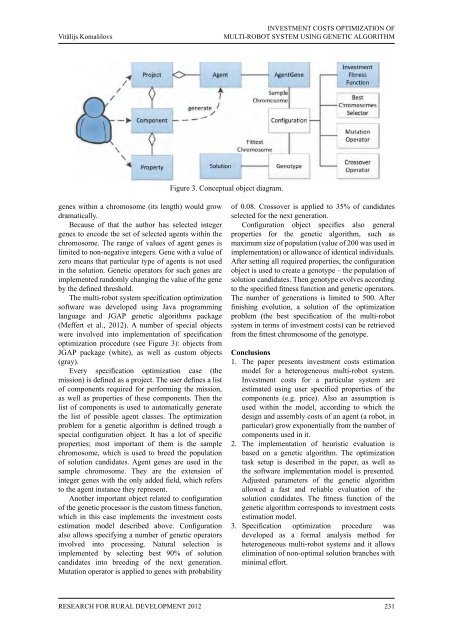
Vitālijs KomašilovsINVESTMENT COSTS OPTIMIZATION <strong>OF</strong>MULTI-ROBOT SYSTEM USING GENETIC ALGORITHMFigure 3. Conceptual object diagram.genes within a chromosome (its length) would growdramatically.Because of that the author has selected integergenes to encode the set of selected agents within thechromosome. The range of values of agent genes islimited to non-negative integers. Gene with a value ofzero means that particular type of agents is not usedin the solution. Genetic operators for such genes areimplemented randomly changing the value of the geneby the defined threshold.The multi-robot system specification optimizationsoftware was developed using Java programminglanguage and JGAP genetic algorithms package(Meffert et al., 2012). A number of special objectswere involved into implementation of specificationoptimization procedure (see Figure 3): objects fromJGAP package (white), as well as custom objects(gray).Every specification optimization case (themission) is defined as a project. The user defines a listof components required for performing the mission,as well as properties of these components. Then thelist of components is used to automatically generatethe list of possible agent classes. The optimizationproblem for a genetic algorithm is defined trough aspecial configuration object. It has a lot of specificproperties; most important of them is the samplechromosome, which is used to breed the populationof solution candidates. Agent genes are used in thesample chromosome. They are the extension ofinteger genes with the only added field, which refersto the agent instance they represent.Another important object related to configurationof the genetic processor is the custom fitness function,which in this case implements the investment costsestimation model described above. Configurationalso allows specifying a number of genetic operatorsinvolved into processing. Natural selection isimplemented by selecting best 90% of solutioncandidates into breeding of the next generation.Mutation operator is applied to genes with probabilityof 0.08. Crossover is applied to 35% of candidatesselected for the next generation.Configuration object specifies also generalproperties for the genetic algorithm, such asmaximum size of population (value of 200 was used inimplementation) or allowance of identical individuals.After setting all required properties, the configurationobject is used to create a genotype – the population ofsolution candidates. Then genotype evolves accordingto the specified fitness function and genetic operators.The number of generations is limited to 500. Afterfinishing evolution, a solution of the optimizationproblem (the best specification of the multi-robotsystem in terms of investment costs) can be retrievedfrom the fittest chromosome of the genotype.Conclusions1. The paper presents investment costs estimationmodel for a heterogeneous multi-robot system.Investment costs for a particular system areestimated using user specified properties of thecomponents (e.g. price). Also an assumption isused within the model, according to which thedesign and assembly costs of an agent (a robot, inparticular) grow exponentially from the number ofcomponents used in it.2. The implementation of heuristic evaluation isbased on a genetic algorithm. The optimizationtask setup is described in the paper, as well asthe software implementation model is presented.Adjusted parameters of the genetic algorithmallowed a fast and reliable evaluation of thesolution candidates. The fitness function of thegenetic algorithm corresponds to investment costsestimation model.3. Specification optimization procedure wasdeveloped as a formal analysis method forheterogeneous multi-robot systems and it allowselimination of non-optimal solution branches withminimal effort.Research for Rural Development 2012231













