Fuxx Control - ARS 2320 / ARS 2340 Instruction Manual - Kuhnke
Fuxx Control - ARS 2320 / ARS 2340 Instruction Manual - Kuhnke
Fuxx Control - ARS 2320 / ARS 2340 Instruction Manual - Kuhnke

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
KUHNKE Automation <strong>Fuxx</strong> <strong>Control</strong> <strong>ARS</strong> <strong>2320</strong> / <strong>ARS</strong> <strong>2340</strong><br />
Terminals ZK+ and ZK- can be used to interconnect the DC-links of several <strong>ARS</strong> 2300 servo<br />
positioning controllers. DC-link coupling is interesting for applications with high braking energies or for<br />
applications requiring movements to be carried out even in the case of power failure.<br />
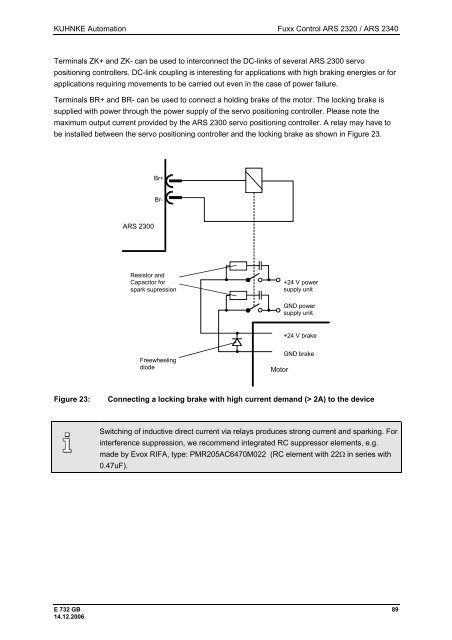
Terminals BR+ and BR- can be used to connect a holding brake of the motor. The locking brake is<br />
supplied with power through the power supply of the servo positioning controller. Please note the<br />
maximum output current provided by the <strong>ARS</strong> 2300 servo positioning controller. A relay may have to<br />
be installed between the servo positioning controller and the locking brake as shown in Figure 23.<br />
<strong>ARS</strong> 2300<br />
Br+<br />
Br-<br />
Resistor and<br />
Capacitor for<br />
spark supression<br />
Freewheeling<br />
diode<br />
Motor<br />
+24 V power<br />
supply unit<br />
GND power<br />
supply unit<br />
+24 V brake<br />
GND brake<br />
Figure 23: Connecting a locking brake with high current demand (> 2A) to the device<br />
Switching of inductive direct current via relays produces strong current and sparking. For<br />
interference suppression, we recommend integrated RC suppressor elements, e.g.<br />
made by Evox RIFA, type: PMR205AC6470M022 (RC element with 22Ω in series with<br />
0.47uF).<br />
E 732 GB 89<br />
14.12.2006