

Simulation cognitive de la prise de décision d'experts; application au ...
Simulation cognitive de la prise de décision d'experts; application au ...
Simulation cognitive de la prise de décision d'experts; application au ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
tel-00547128, version 1 - 15 Dec 2010<br />
Chapitre 4 : Validation du modèle DBP 87<br />
L’amplitu<strong>de</strong> <strong>de</strong>s manœuvres d’évitement est, le plus souvent, com<strong>prise</strong> dans un intervalle <strong>de</strong><br />
10° à 45° (19° en moyenne pour nos données). Les changements <strong>de</strong> vitesses (uniquement lors<br />
d’évitements <strong>de</strong> collisions à courte distance) sont <strong>de</strong> l’ordre <strong>de</strong> 10 nœuds.<br />
Le retour sur <strong>la</strong> route peut reposer sur <strong>de</strong>ux stratégies différentes : le retour sur <strong>la</strong> route<br />
théorique ou le rég<strong>la</strong>ge du cap sur le prochain point <strong>de</strong> passage (way point). Cette <strong>de</strong>rnière<br />
stratégie consiste en une récupération du point <strong>de</strong> passage du navire précé<strong>de</strong>mment calculé<br />
lors du calcul <strong>de</strong> route. L’<strong>au</strong>tre métho<strong>de</strong> consiste à recréer un point <strong>de</strong> passage intermédiaire<br />
sur <strong>la</strong> précé<strong>de</strong>nte route prévue. Le retour sur <strong>la</strong> route est ainsi plus efficace pour éviter les<br />
obstacles qui pourraient apparaitre après un évitement <strong>de</strong> collision (et le changement <strong>de</strong><br />
trajectoire et <strong>de</strong> position qui en ont résulté).<br />
Cette section a présenté les liens entre le cas d’<strong>application</strong> et le module <strong>de</strong> <strong>prise</strong> <strong>de</strong> <strong>décision</strong>.<br />
La section suivante traite <strong>de</strong>s étapes nécessaires à <strong>la</strong> création du rôle cognitif d’anticollision<br />
suivant le modèle DBP.<br />
3. CogTRANS, un simu<strong>la</strong>teur intégrant <strong>la</strong> <strong>prise</strong> <strong>de</strong> <strong>décision</strong><br />
naturelle<br />
Cette partie décrit plus particulièrement le système <strong>de</strong> <strong>prise</strong> <strong>de</strong> <strong>décision</strong> DBP appliqué à <strong>la</strong><br />
simu<strong>la</strong>tion du trafic maritime. Une première section est consacrée à <strong>la</strong> construction <strong>de</strong>s<br />
patrons <strong>de</strong> situations prototypiques utilisés pour les simu<strong>la</strong>tions <strong>de</strong> l’évitement entre ferries<br />
et cargos. Les sections suivantes présentent et analysent les résultats <strong>de</strong>s simu<strong>la</strong>tions. Avant<br />
<strong>la</strong> conclusion, une <strong>de</strong>rnière section traite <strong>de</strong> l’utilisation <strong>de</strong> CogTRANS pour décrire<br />
l’évitement <strong>de</strong> collisions chez les marins pêcheurs.<br />
3.1.Construction <strong>de</strong> patrons <strong>de</strong> situations prototypiques<br />
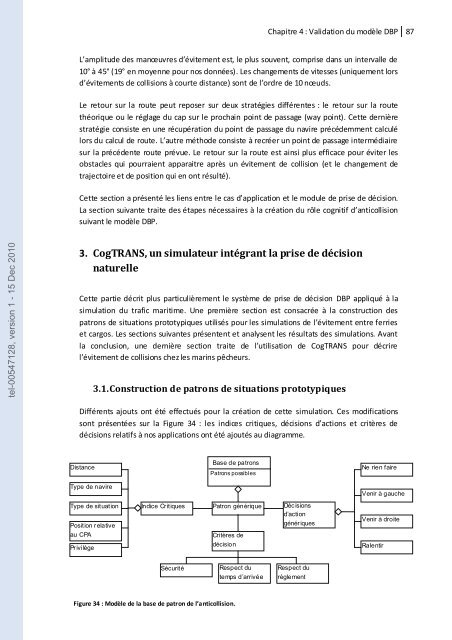
Différents ajouts ont été effectués pour <strong>la</strong> création <strong>de</strong> cette simu<strong>la</strong>tion. Ces modifications<br />
sont présentées sur <strong>la</strong> Figure 34 : les indices critiques, <strong>décision</strong>s d’actions et critères <strong>de</strong><br />
<strong>décision</strong>s re<strong>la</strong>tifs à nos <strong>application</strong>s ont été ajoutés <strong>au</strong> diagramme.<br />
Distance<br />
Type <strong>de</strong> navire<br />
Type <strong>de</strong> situation<br />
Position re<strong>la</strong>tive<br />
<strong>au</strong> CPA<br />
Privilège<br />
Indice Critiques<br />
Base <strong>de</strong> patrons<br />
Patrons possibles<br />
Patron générique Déc isions<br />
d’action<br />
génériques<br />
Critères <strong>de</strong><br />
<strong>décision</strong><br />
Sécurité Respect du<br />
temps d’arrivée<br />
Figure 34 : Modèle <strong>de</strong> <strong>la</strong> base <strong>de</strong> patron <strong>de</strong> l’anticollision.<br />
Respect du<br />
règlement<br />
Ne rien faire<br />
Venir à g<strong>au</strong>che<br />
Venir à droite<br />
Ralentir














