kezdőfeltételből kiindulva – amely nem lehet karakterisztika – elegendően sűrűn felvett karakterisztikák metszéspontjaiban az ismeretlenek meghatározhatók. Az előző ún. természetes karakterisztikák módszerének használata elég körülményes. Hátrányai az ún. interpolációs rácsmódszerrel küszöbölhetők ki. Az interpolációs rácsmódszer viszont nemcsak egy csőből álló, hanem összetett fürtszerű és hurkolt csőhálózatokban kialakuló gázmozgások modellezésére is alkalmassá tehető, ezért kiválóan alkalmas a vákuumos szennyvízhálózatok csővezetékei légtelenítésének modellezésére. 4.2.2.3 Csővezeték hálózatokban kialakuló instacionárius gázáramlások számítása az interpolációs rácsmódszerrel Az ún. természetes karakterisztikák módszerét jelen tanulmányban nem, hanem helyette a több előnyös tulajdonsággal bíró ún. interpolációs rácsmódszert használom a számításokra, amelyet korábbi írásomban ismertettem (FÁBRY, BARÓTFI 2008). Az interpolációs rácsmódszernél az x~t síkot állandó Δx, Δt osztásközű hálózattal kell ellátni (38. ábra). A hálózatot ill. csövet olyan csőszakaszokra kell bontani, amelyekben a csősúrlódási tényező és a csőátmérő állandó. Az egyes szakaszok jelölésére az i indexet használom, a szakaszokban lévő számítási pontok számát N i -vel jelölöm. A csőhálózat egy tetszőleges i-edik csőszakaszához hozzárendelem az x i ~t síkot. A számítási pontok (rácspontok) mindegyikét egy i,j,k index-hármas jelöli, ahol i csőszakaszt, j helyet, k pedig időpontot jelöl. Tételezzük fel, hogy a k-adik időpillanat minden rácspontjában ismerjük v i,j,k , p i,j,k és ρ i,j,k értékét pl. kezdeti feltételből. Ezen a ponton visszautalok a korábbiakra és megjegyezem, hogy hiperbolikus esetben a hullámsebesség (hangsebesség) véges értékű, és ezzel a sebességgel halad bármilyen zavarás illetőleg információ, ezért a karakterisztika vonalak valósak és jól elkülönültek. Az általam vizsgált esetben ez azt jelenti, hogy az x~t fizikai síkon egy adott pontbeli állapot (pl. M pontban) csak az oda befutó I. és II. karakterisztika vonalakon belüli tartományban lévő állapotoktól függhet (VERSTEEG, MALALASEKERA 1995). A két szélső karakterisztika által határolt tartomány a karakterisztika mező. t i,0,k+1 i,j-1,k+1 i,j,k+1 i,j+1,k+1 M I. II. P III. R Q i,0,k i,j-1,k i,j,k x i i,j+1,k 38. ábra: Az i-edik csőszakaszhoz kapcsolt rácshálózat a karakterisztikákkal 76
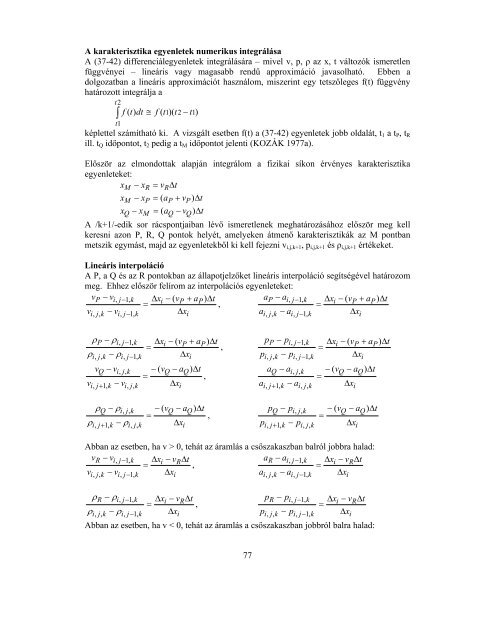
A karakterisztika egyenletek numerikus integrálása A (37-42) differenciálegyenletek integrálására – mivel v, p, ρ az x, t változók ismeretlen függvényei – lineáris vagy magasabb rendű approximáció javasolható. Ebben a dolgozatban a lineáris approximációt használom, miszerint egy tetszőleges f(t) függvény határozott integrálja a t2 ∫ f ( t) dt ≅ f ( t1)( t2 − t1) t1 képlettel számítható ki. A vizsgált esetben f(t) a (37-42) egyenletek jobb oldalát, t 1 a t P , t R ill. t Q időpontot, t 2 pedig a t M időpontot jelenti (KOZÁK 1977a). Először az elmondottak alapján integrálom a fizikai síkon érvényes karakterisztika egyenleteket: xM − xR = vRΔt xM − xP = ( aP + vP) Δt xQ − xM = ( aQ − vQ ) Δt A /k+1/-edik sor rácspontjaiban lévő ismeretlenek meghatározásához először meg kell keresni azon P, R, Q pontok helyét, amelyeken átmenő karakterisztikák az M pontban metszik egymást, majd az egyenletekből ki kell fejezni v i,j,k+1 , p i,j,k+1 és ρ i,j,k+1 értékeket. Lineáris interpoláció A P, a Q és az R pontokban az állapotjelzőket lineáris interpoláció segítségével határozom meg. Ehhez először felírom az interpolációs egyenleteket: vP − vi, j− 1, k Δxi − ( vP + aP) Δt aP − ai, j− 1, k Δx = , i − ( vP + aP) Δt = vi, j, k − vi, j−1, k Δxi ai, j, k − ai, j−1, k Δxi ρ ρ ρ P − i, j− 1, k Δxi − ( vP + aP) Δt = , i, j, k − ρi, j−1, k Δxi vQ − vi, j, k − ( vQ − aQ ) Δt = , vi, j+ 1, k − vi, j, k Δxi pP − pi, j− 1, k Δxi − ( vP + aP) Δt = pi, j, k − pi, j−1, k Δxi aQ − ai, j, k − ( vQ − aQ ) Δt = ai, j+ 1, k − ai, j, k Δxi ρ ρQ − ρi, j, k i, j+ 1, k − ρi, j, k = − ( vQ − aQ ) Δt Δxi , pQ − pi, j, k pi, j+ 1, k − pi, j, k = − ( vQ − aQ ) Δt Δxi Abban az esetben, ha v > 0, tehát az áramlás a csőszakaszban balról jobbra halad: vR − vi, j−1, k Δxi − vRΔt aR − ai, j−1, k Δx = , i − vRΔt = vi, j, k − vi, j−1, k Δxi ai, j, k − ai, j−1, k Δxi ρR − ρi, j−1, k Δxi − vRΔt pR − pi, j−1, k Δx = , i − vRΔt = ρi, j, k − ρi, j−1, k Δxi pi, j, k − pi, j−1, k Δxi Abban az esetben, ha v < 0, tehát az áramlás a csőszakaszban jobbról balra halad: 77
- Page 1 and 2:
Szent István Egyetem KÖRNYEZETBAR
- Page 3 and 4:
TARTALOMJEGYZÉK ELŐSZÓ 7 1. JEL
- Page 5:
M8 A VÁKUUMOS FOLYADÉKSZÁLLÍTÓ
- Page 9 and 10:
1. JELÖLÉSEK ÉS RÖVIDÍTÉSEK J
- Page 11 and 12:
2. BEVEZETÉS Egy település közm
- Page 13 and 14:
3. IRODALMI ÁTTEKINTÉS 3.2 Vákuu
- Page 15 and 16:
Érdekességként említjük, hogy
- Page 17 and 18:
Ez már egy igazi modern rendszerne
- Page 19 and 20:
vízszintes csőben történő stac
- Page 21 and 22:
4. ábra: A kétfázisú áramlás
- Page 23 and 24:
A mai modern pneumatikus vezérlés
- Page 25 and 26: akadályokat anélkül, hogy annak
- Page 27 and 28: 3.2.2.4 A vákuumgépház A vákuum
- Page 29 and 30: 14. ábra: A vákuumgépház főbb
- Page 31 and 32: 3.2.3 Előnyök a gravitációs csa
- Page 33 and 34: Az előző bekezdésben említett z
- Page 35 and 36: mind pedig leállást, üzemszünet
- Page 37 and 38: A rendszer helyes működése lény
- Page 39 and 40: Néhány konkrét adat olvasható a
- Page 41 and 42: 1. Táblázat: A hazánkban létes
- Page 43 and 44: előforduló egyéb magassági prof
- Page 45: A vákuumos csővezeték magassági
- Page 48 and 49: csak mérni lehet, az ezzel kapcsol
- Page 50 and 51: ( 45 + α' ) ⋅ 2 ⋅ ( e − d )
- Page 52 and 53: vákuumveszteség a kontraesés eme
- Page 54 and 55: 24. ábra: Kis levegő/víz arány
- Page 56 and 57: A következő ábrákon látható,
- Page 58 and 59: A csőág mentén mindössze három
- Page 60 and 61: A vákuumrendszerben lévő gáz á
- Page 62 and 63: dW ' = − p ⋅ dV a térfogatvál
- Page 64 and 65: Vákuumtartály q v p, V, T, m Vák
- Page 66 and 67: 1.2 . 10 5 Idõ t, (s) 1 . 10 5 8 .
- Page 68 and 69: hőátbocsátási tényezővel jell
- Page 70 and 71: 1.1 A nyomás változása az idõ f
- Page 72 and 73: A mozgásegyenletet a ∂v ∂v 1
- Page 74 and 75: b = ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
- Page 78 and 79: vR − vi, j, k vi, j+ 1, k − vi,
- Page 80 and 81: A (43-64) összefüggésekkel a k-a
- Page 82 and 83: h be = cp ⋅Ti , a tartályba bel
- Page 84 and 85: i,0,k+1 i,1,k+1 i,2,k+1 II. dx i dt
- Page 86 and 87: Az angol Iseki vákuumos szennyvíz
- Page 88 and 89: A szennyvizet helyettesítő kékre
- Page 90 and 91: 43. ábra: A vákuumos folyadéksz
- Page 92 and 93: 45. ábra: A vákuumos folyadéksz
- Page 94 and 95: 47. ábra: A tanpálya vákuumközp
- Page 96 and 97: 49. ábra: SW Umwelttechnik gyártm
- Page 98 and 99: 52. ábra: A tanpálya Danfoss frek
- Page 100 and 101: Ahogy már részletesen ismertetés
- Page 102 and 103: Az egyes tartálynyomás értékeke
- Page 104 and 105: 56. ábra: A vákuumos folyadéksz
- Page 106 and 107: A méréssorozat alapján számíto
- Page 108 and 109: f = −0 .019 ⋅ r + 0.18 (101) Az
- Page 111 and 112: 5. AZ EREDMÉNYEK ÖSSZEFOGLALÁSA
- Page 113: A valós nagyméretű települési
- Page 117 and 118: 7. ÖSSZEFOGLALÁS Hazánk jelentő
- Page 119 and 120: 8. SUMMARY A large part of our coun
- Page 121 and 122: MELLÉKLET M1 Irodalom ABRAMSON A.
- Page 123 and 124: KISS Z. (2000): M + A Kft. főmérn
- Page 125 and 126: M2 A csatornázás története és
- Page 127 and 128:
Hazánkban az aquincumi romok a ró
- Page 129 and 130:
M3 A nyomás változása egy vákuu
- Page 131 and 132:
d = 0,16 m; q v = 700 m 3 /h; 1.2×
- Page 133 and 134:
M4 A Temesvári Műszaki Egyetem el
- Page 135 and 136:
M6 A Dresser forgódugattyús gáz
- Page 137 and 138:
M8 A vákuumos folyadékszállító
- Page 139 and 140:
232,31 25,05 22,09 960 0,65 0,187 0
- Page 141 and 142:
M9 A méréssorozat alapján szám
- Page 143 and 144:
143
- Page 145 and 146:
145
- Page 147 and 148:
147
- Page 149 and 150:
149
- Page 151:
M11 Az Iseki Vacuum Systems Ltd. ny
- Page 154 and 155:
FÁBRY G. (2006): Vákuumos és gra