

Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
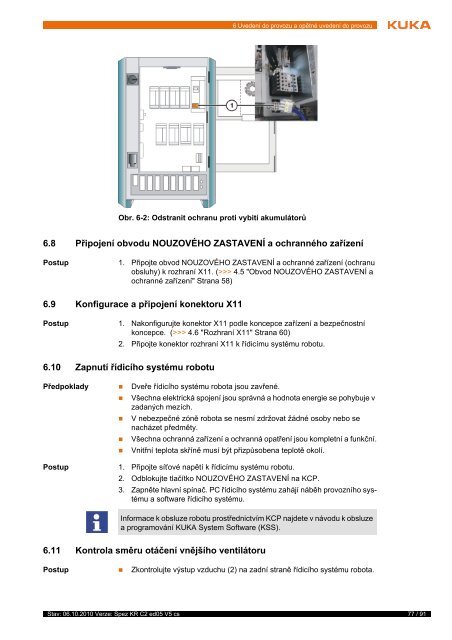
6 Uvedení do provozu a opětné uvedení do provozuObr. 6-2: Odstranit ochranu proti vybití akumulátorů6.8 Připojení obvodu NOUZOVÉHO ZASTAVENÍ a ochranného zařízeníPostup 1. Připojte obvod NOUZOVÉHO ZASTAVENÍ a ochranné zařízení (ochranuobsluhy) k rozhraní X11. (>>> 4.5 "Obvod NOUZOVÉHO ZASTAVENÍ aochranné zařízení" Strana 58)6.9 Konfigurace a připojení konektoru X11Postup 1. Nakonfigurujte konektor X11 podle koncepce zařízení a bezpečnostníkoncepce. (>>> 4.6 "Rozhraní X11" Strana 60)2. Připojte konektor rozhraní X11 k řídicímu systému robotu.6.10 Zapnutí řídicího systému robotuPředpoklady • Dveře řídicího systému robota jsou zavřené.• Všechna elektrická spojení jsou správná a hodnota energie se pohybuje vzadaných mezích.• V nebezpečné zóně robota se nesmí zdržovat žádné osoby nebo senacházet předměty.• Všechna ochranná zařízení a ochranná opatření jsou kompletní a funkční.• Vnitřní teplota skříně musí být přizpůsobena teplotě okolí.Postup 1. Připojte síťové napětí k řídicímu systému robotu.2. Odblokujte tlačítko NOUZOVÉHO ZASTAVENÍ na KCP.3. Zapněte hlavní spínač. PC řídicího systému zahájí náběh provozního systémua software řídicího systému.Informace k obsluze robotu prostřednictvím KCP najdete v návodu k obsluzea programování <strong>KUKA</strong> System Software (KSS).6.11 Kontrola směru otáčení vnějšího ventilátoruPostup • Zkontrolujte výstup vzduchu (2) na zadní straně řídicího systému robota.Stav: 06.10.2010 Verze: Spez KR C2 ed05 V5 cs77 / 91













