

8. PSI und die Menschen
8. PSI und die Menschen
8. PSI und die Menschen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
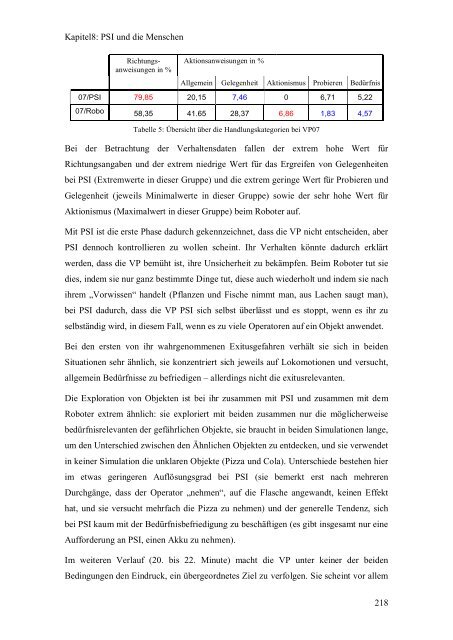
Kapitel8: <strong>PSI</strong> <strong>und</strong> <strong>die</strong> <strong>Menschen</strong><br />
Richtungsanweisungen<br />
in %<br />
Aktionsanweisungen in %<br />
Allgemein Gelegenheit Aktionismus Probieren Bedürfnis<br />
07/<strong>PSI</strong> 79,85 20,15 7,46 0 6,71 5,22<br />
07/Robo 58,35 41.65 28,37 6,86 1,83 4,57<br />
Tabelle 5: Übersicht über <strong>die</strong> Handlungskategorien bei VP07<br />
Bei der Betrachtung der Verhaltensdaten fallen der extrem hohe Wert für<br />
Richtungsangaben <strong>und</strong> der extrem niedrige Wert für das Ergreifen von Gelegenheiten<br />
bei <strong>PSI</strong> (Extremwerte in <strong>die</strong>ser Gruppe) <strong>und</strong> <strong>die</strong> extrem geringe Wert für Probieren <strong>und</strong><br />
Gelegenheit (jeweils Minimalwerte in <strong>die</strong>ser Gruppe) sowie der sehr hohe Wert für<br />
Aktionismus (Maximalwert in <strong>die</strong>ser Gruppe) beim Roboter auf.<br />
Mit <strong>PSI</strong> ist <strong>die</strong> erste Phase dadurch gekennzeichnet, dass <strong>die</strong> VP nicht entscheiden, aber<br />
<strong>PSI</strong> dennoch kontrollieren zu wollen scheint. Ihr Verhalten könnte dadurch erklärt<br />
werden, dass <strong>die</strong> VP bemüht ist, ihre Unsicherheit zu bekämpfen. Beim Roboter tut sie<br />
<strong>die</strong>s, indem sie nur ganz bestimmte Dinge tut, <strong>die</strong>se auch wiederholt <strong>und</strong> indem sie nach<br />
ihrem „Vorwissen“handelt (Pflanzen <strong>und</strong> Fische nimmt man, aus Lachen saugt man),<br />
bei <strong>PSI</strong> dadurch, dass <strong>die</strong> VP <strong>PSI</strong> sich selbst überlässt <strong>und</strong> es stoppt, wenn es ihr zu<br />
selbständig wird, in <strong>die</strong>sem Fall, wenn es zu viele Operatoren auf ein Objekt anwendet.<br />
Bei den ersten von ihr wahrgenommenen Exitusgefahren verhält sie sich in beiden<br />
Situationen sehr ähnlich, sie konzentriert sich jeweils auf Lokomotionen <strong>und</strong> versucht,<br />
allgemein Bedürfnisse zu befriedigen –allerdings nicht <strong>die</strong> exitusrelevanten.<br />
Die Exploration von Objekten ist bei ihr zusammen mit <strong>PSI</strong> <strong>und</strong> zusammen mit dem<br />
Roboter extrem ähnlich: sie exploriert mit beiden zusammen nur <strong>die</strong> möglicherweise<br />
bedürfnisrelevanten der gefährlichen Objekte, sie braucht in beiden Simulationen lange,<br />
um den Unterschied zwischen den Ähnlichen Objekten zu entdecken, <strong>und</strong> sie verwendet<br />
in keiner Simulation <strong>die</strong> unklaren Objekte (Pizza <strong>und</strong> Cola). Unterschiede bestehen hier<br />
im etwas geringeren Auflösungsgrad bei <strong>PSI</strong> (sie bemerkt erst nach mehreren<br />
Durchgänge, dass der Operator „nehmen“, auf <strong>die</strong> Flasche angewandt, keinen Effekt<br />
hat, <strong>und</strong> sie versucht mehrfach <strong>die</strong> Pizza zu nehmen) <strong>und</strong> der generelle Tendenz, sich<br />
bei <strong>PSI</strong> kaum mit der Bedürfnisbefriedigung zu beschäftigen (es gibt insgesamt nur eine<br />
Aufforderung an <strong>PSI</strong>, einen Akku zu nehmen).<br />
Im weiteren Verlauf (20. bis 22. Minute) macht <strong>die</strong> VP unter keiner der beiden<br />
Bedingungen den Eindruck, ein übergeordnetes Ziel zu verfolgen. Sie scheint vor allem<br />
218













