

8. PSI und die Menschen
8. PSI und die Menschen
8. PSI und die Menschen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel8: <strong>PSI</strong> <strong>und</strong> <strong>die</strong> <strong>Menschen</strong><br />
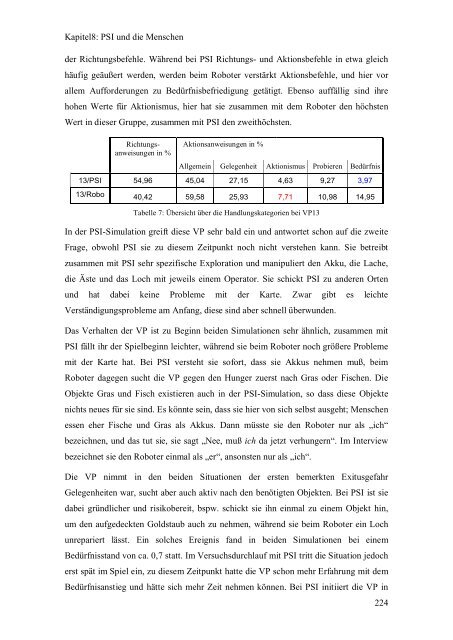
der Richtungsbefehle. Während bei <strong>PSI</strong> Richtungs- <strong>und</strong> Aktionsbefehle in etwa gleich<br />
häufig geäußert werden, werden beim Roboter verstärkt Aktionsbefehle, <strong>und</strong> hier vor<br />
allem Aufforderungen zu Bedürfnisbefriedigung getätigt. Ebenso auffällig sind ihre<br />
hohen Werte für Aktionismus, hier hat sie zusammen mit dem Roboter den höchsten<br />
Wert in <strong>die</strong>ser Gruppe, zusammen mit <strong>PSI</strong> den zweithöchsten.<br />
Richtungsanweisungen<br />
in %<br />
Aktionsanweisungen in %<br />
Allgemein Gelegenheit Aktionismus Probieren Bedürfnis<br />
13/<strong>PSI</strong> 54,96 45,04 27,15 4,63 9,27 3,97<br />
13/Robo 40,42 59,58 25,93 7,71 10,98 14,95<br />
Tabelle 7: Übersicht über <strong>die</strong> Handlungskategorien bei VP13<br />
In der <strong>PSI</strong>-Simulation greift <strong>die</strong>se VP sehr bald ein <strong>und</strong> antwortet schon auf <strong>die</strong> zweite<br />
Frage, obwohl <strong>PSI</strong> sie zu <strong>die</strong>sem Zeitpunkt noch nicht verstehen kann. Sie betreibt<br />
zusammen mit <strong>PSI</strong> sehr spezifische Exploration <strong>und</strong> manipuliert den Akku, <strong>die</strong> Lache,<br />
<strong>die</strong> Äste <strong>und</strong> das Loch mit jeweils einem Operator. Sie schickt <strong>PSI</strong> zu anderen Orten<br />
<strong>und</strong> hat dabei keine Probleme mit der Karte. Zwar gibt es leichte<br />
Verständigungsprobleme am Anfang, <strong>die</strong>se sind aber schnell überw<strong>und</strong>en.<br />
Das Verhalten der VP ist zu Beginn beiden Simulationen sehr ähnlich, zusammen mit<br />
<strong>PSI</strong> fällt ihr der Spielbeginn leichter, während sie beim Roboter noch größere Probleme<br />
mit der Karte hat. Bei <strong>PSI</strong> versteht sie sofort, dass sie Akkus nehmen muß, beim<br />
Roboter dagegen sucht <strong>die</strong> VP gegen den Hunger zuerst nach Gras oder Fischen. Die<br />
Objekte Gras <strong>und</strong> Fisch existieren auch in der <strong>PSI</strong>-Simulation, so dass <strong>die</strong>se Objekte<br />
nichts neues für sie sind. Es könnte sein, dass sie hier von sich selbst ausgeht; <strong>Menschen</strong><br />
essen eher Fische <strong>und</strong> Gras als Akkus. Dann müsste sie den Roboter nur als „ich“<br />
bezeichnen, <strong>und</strong> das tut sie, sie sagt „Nee, muß ich da jetzt verhungern“. Im Interview<br />
bezeichnet sie den Roboter einmal als „er“, ansonsten nur als „ich“.<br />
Die VP nimmt in den beiden Situationen der ersten bemerkten Exitusgefahr<br />
Gelegenheiten war, sucht aber auch aktiv nach den benötigten Objekten. Bei <strong>PSI</strong> ist sie<br />
dabei gründlicher <strong>und</strong> risikobereit, bspw. schickt sie ihn einmal zu einem Objekt hin,<br />
um den aufgedeckten Goldstaub auch zu nehmen, während sie beim Roboter ein Loch<br />
unrepariert lässt. Ein solches Ereignis fand in beiden Simulationen bei einem<br />
Bedürfnisstand von ca. 0,7 statt. Im Versuchsdurchlauf mit <strong>PSI</strong> tritt <strong>die</strong> Situation jedoch<br />
erst spät im Spiel ein, zu <strong>die</strong>sem Zeitpunkt hatte <strong>die</strong> VP schon mehr Erfahrung mit dem<br />
Bedürfnisanstieg <strong>und</strong> hätte sich mehr Zeit nehmen können. Bei <strong>PSI</strong> initiiert <strong>die</strong> VP in<br />
224













