

8. PSI und die Menschen
8. PSI und die Menschen
8. PSI und die Menschen

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel8: <strong>PSI</strong> <strong>und</strong> <strong>die</strong> <strong>Menschen</strong><br />
VP17: <strong>PSI</strong> als Persönlichkeit<br />
Diese Versuchsperson stellte im Interview heraus, dass sie <strong>PSI</strong> auch als Persönlichkeit<br />
kennen lernen wollte: „Das war, ja, es war irgendwie dynamischer, ähm, es war<br />
vielleicht auch deshalb, weil es komplexer war, vielleicht auch deshalb, weil es<br />
interessant war, ja, <strong>PSI</strong> kennen zu lernen, wie er reagiert in bestimmten Situationen, was<br />
natürlich auch, ähm, <strong>die</strong> Motivation, mit so nem Programm zu arbeiten steigert, weil<br />
man möchte natürlich rausfinden: „Was is des? Was is des für ne Person oder <strong>PSI</strong>?“Ja,<br />
ich mein, man identifiziert <strong>die</strong>sen <strong>PSI</strong> dann mit dem anderen Spieler vielleicht auch“<br />
(VP17, Vergleichsinterview, Frage „Was war einfacher?“).<br />
Auch <strong>die</strong> Leistungen <strong>die</strong>ser VP bewegen sich im Mittelfeld, auffällig ist <strong>die</strong> sehr<br />
geringe Zahl an Exitussen bei <strong>PSI</strong> (kein einziger, beim Roboter erlitt sie zwei<br />
Zusammenbrüche, das ist ein mittlerer Wert) <strong>und</strong> <strong>die</strong> niedrigen Werte für gesammelte<br />
Goldstücke (12 beim Roboter, das ist der geringste Wert, <strong>und</strong> 37 bei <strong>PSI</strong>, das ist der<br />
zweitniedrigste Wert).<br />
Diese Versuchsperson zeigt viele Extremwerte in ihren Verhaltensdaten. Sowohl bei<br />
<strong>PSI</strong> als auch beim Roboter hat sie (prozentual) <strong>die</strong> meisten Richtungsanweisungen. In<br />
beiden Simulationen liegt der Schwerpunkt damit eher auf Richtungs- als auf<br />
Aktionsanweisungen.<br />
Große Unterschiede gibt es in den „Probieren“-Werten, <strong>die</strong> sich beim Roboter im<br />
mittleren Bereich bewegen, bei <strong>PSI</strong> dagegen stellt sie den Minimalwert in <strong>die</strong>ser<br />
Gruppe. Die Werte für Bedürfnisbefriedigung sind in beiden Simulationen gering, beim<br />
Roboter der geringste, bei <strong>PSI</strong> der zweitniedrigste Wert in <strong>die</strong>ser Gruppe. Ebenfalls sehr<br />
niedrig ist der Wert für das Ergreifen von Gelegenheiten beim Roboter.<br />
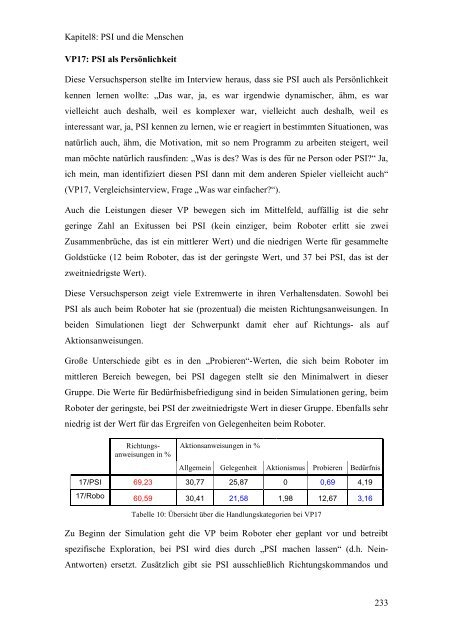
Richtungsanweisungen<br />
in %<br />
Aktionsanweisungen in %<br />
Allgemein Gelegenheit Aktionismus Probieren Bedürfnis<br />
17/<strong>PSI</strong> 69,23 30,77 25,87 0 0,69 4,19<br />
17/Robo 60,59 30,41 21,58 1,98 12,67 3,16<br />
Tabelle 10: Übersicht über <strong>die</strong> Handlungskategorien bei VP17<br />
Zu Beginn der Simulation geht <strong>die</strong> VP beim Roboter eher geplant vor <strong>und</strong> betreibt<br />
spezifische Exploration, bei <strong>PSI</strong> wird <strong>die</strong>s durch „<strong>PSI</strong> machen lassen“ (d.h. Nein-<br />
Antworten) ersetzt. Zusätzlich gibt sie <strong>PSI</strong> ausschließlich Richtungskommandos <strong>und</strong><br />
233













