Introduction to Digital Signal and System Analysis - Tutorsindia
Introduction to Digital Signal and System Analysis - Tutorsindia
Introduction to Digital Signal and System Analysis - Tutorsindia

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Introduction</strong> <strong>to</strong> <strong>Digital</strong> <strong>Signal</strong> <strong>and</strong> <strong>System</strong> <strong>Analysis</strong><br />
Z Domain <strong>Analysis</strong><br />
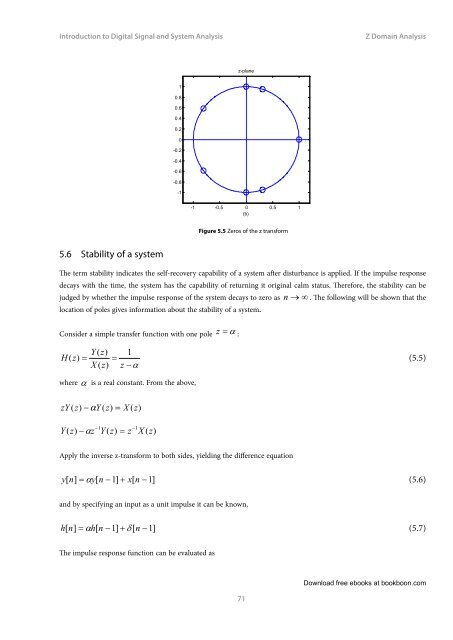
z-plane<br />
1<br />
0.8<br />
0.6<br />
0.4<br />
0.2<br />
0<br />
-0.2<br />
-0.4<br />
-0.6<br />
-0.8<br />
-1<br />
-1 -0.5 0 0.5 1<br />
(b)<br />
Figure 5.5 Zeros of the z transform<br />
5.6 Stability of a system<br />
The term stability indicates the self-recovery capability of a system after disturbance is applied. If the impulse response<br />
decays with the time, the system has the capability of returning it original calm status. Therefore, the stability can be<br />
judged by whether the impulse response of the system decays <strong>to</strong> zero as n → ∞ . The following will be shown that the<br />
location of poles gives information about the stability of a system.<br />
Consider a simple transfer function with one pole<br />
z = α :<br />
Y ( z)<br />
1<br />
H ( z)<br />
= = (5.5)<br />
X ( z)<br />
z −α<br />
where α is a real constant. From the above,<br />
zY ( z)<br />
− α Y ( z)<br />
= X ( z)<br />
Y ( z)<br />
−αz<br />
−1<br />
Y ( z)<br />
= z<br />
−1<br />
X ( z)<br />
Apply the inverse z-transform <strong>to</strong> both sides, yielding the difference equation<br />
y[ n]<br />
= αy[<br />
n −1]<br />
+ x[<br />
n −1]<br />
(5.6)<br />
<strong>and</strong> by specifying an input as a unit impulse it can be known,<br />
h[ n]<br />
= αh[<br />
n −1]<br />
+ d [ n −1]<br />
(5.7)<br />
The impulse response function can be evaluated as<br />
71<br />
Download free ebooks at bookboon.com