Introduction to Digital Signal and System Analysis - Tutorsindia
Introduction to Digital Signal and System Analysis - Tutorsindia
Introduction to Digital Signal and System Analysis - Tutorsindia

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Introduction</strong> <strong>to</strong> <strong>Digital</strong> <strong>Signal</strong> <strong>and</strong> <strong>System</strong> <strong>Analysis</strong><br />
Z Domain <strong>Analysis</strong><br />
H ( W)<br />
=<br />
(exp( jW)<br />
− 0)(exp( jW)<br />
− 0)(exp( jW)<br />
−1.2)(exp(<br />
jW)<br />
− ( −1)<br />
{ exp( jW)<br />
− (0.5 − j0.7)<br />
}{ exp( jW)<br />
− (0.5 + j0.7)<br />
}(exp(<br />
jW)<br />
− 0.8)<br />
The modulus is<br />
H ( jW)<br />
=<br />
(exp( jW)<br />
−1.2)(exp(<br />
jW)<br />
− ( −1)<br />
{ exp( jW)<br />
− (0.5 − j0.7)<br />
}{ exp( jW)<br />
− (0.5 + j0.7)<br />
}(exp(<br />
jW)<br />
− 0.8)<br />
.<br />
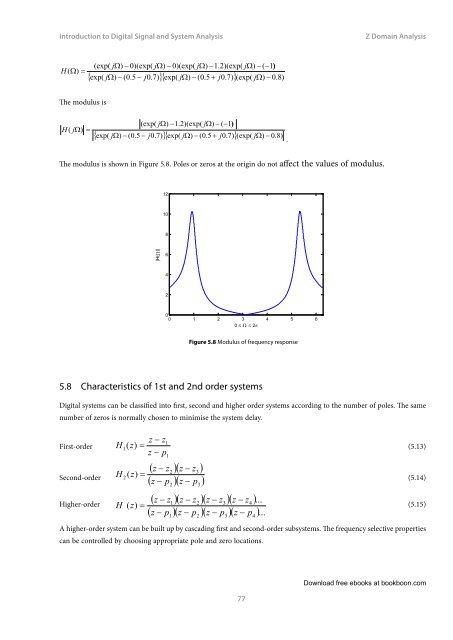
The modulus is shown in Figure 5.8. Poles or zeros at the origin do not affect the values of modulus.<br />
12<br />
10<br />
8<br />
|H(W)|<br />
6<br />
4<br />
2<br />
0<br />
0 1 2 3 4 5 6<br />
0 ≤ W ≤ 2p<br />
Figure 5.8 Modulus of frequency response<br />
5.8 Characteristics of 1st <strong>and</strong> 2nd order systems<br />
<strong>Digital</strong> systems can be classified in<strong>to</strong> first, second <strong>and</strong> higher order systems according <strong>to</strong> the number of poles. The same<br />
number of zeros is normally chosen <strong>to</strong> minimise the system delay.<br />
First-order<br />
Second-order<br />
H<br />
H<br />
z<br />
−<br />
−<br />
z<br />
1<br />
1<br />
( z)<br />
= (5.13)<br />
z p1<br />
2<br />
( z)<br />
( z − z2<br />
)( z − z3<br />
)<br />
( z − p )( z − p )<br />
= (5.14)<br />
( z − z )( )( )( )<br />
Higher-order 1<br />
z − z2<br />
z − z3<br />
z − z4<br />
...<br />
H ( z)<br />
( z − p )( z − p )( z − p )( z − p )...<br />
2<br />
1<br />
3<br />
= (5.15)<br />
2<br />
3<br />
A higher-order system can be built up by cascading first <strong>and</strong> second-order subsystems. The frequency selective properties<br />
can be controlled by choosing appropriate pole <strong>and</strong> zero locations.<br />
4<br />
77<br />
Download free ebooks at bookboon.com