COP_2023_V7_pages

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Definitions for Level of Control (LoC) are shown at Table 1-4 and should be considered alongside the Degrees of<br />
Autonomy in Table 1-2. In practice, levels of control may be different for different functions aboard the same MASS (e.g.<br />
a MASS navigating under LoC4, may also deploy a payload that is controlled at LoC2). The LoC applied to the MASS<br />
may also change during a voyage (e.g. LoC 1 in a VTS, but LoC 4 in open ocean passage).<br />
“Maritime Autonomous Systems (MAS)” general term is used to refer to systems of a remotely operated, semiautonomous,<br />
or autonomous nature.<br />
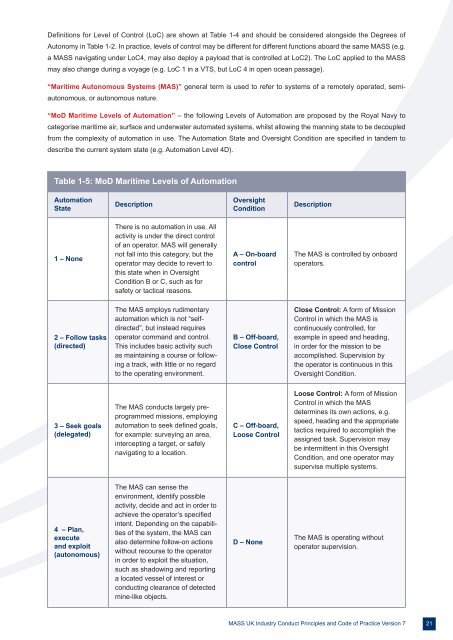
“MoD Maritime Levels of Automation” – the following Levels of Automation are proposed by the Royal Navy to<br />
categorise maritime air, surface and underwater automated systems, whilst allowing the manning state to be decoupled<br />
from the complexity of automation in use. The Automation State and Oversight Condition are specified in tandem to<br />
describe the current system state (e.g. Automation Level 4D).<br />
Table 1-5: MoD Maritime Levels of Automation<br />
Automation<br />
State<br />
Description<br />
Oversight<br />
Condition<br />
Description<br />
1 – None<br />
There is no automation in use. All<br />
activity is under the direct control<br />
of an operator. MAS will generally<br />
not fall into this category, but the<br />
operator may decide to revert to<br />
this state when in Oversight<br />
Condition B or C, such as for<br />
safety or tactical reasons.<br />
A – On-board<br />
control<br />
The MAS is controlled by onboard<br />
operators.<br />
2 – Follow tasks<br />
(directed)<br />
The MAS employs rudimentary<br />
automation which is not “selfdirected”,<br />
but instead requires<br />
operator command and control.<br />
This includes basic activity such<br />
as maintaining a course or following<br />
a track, with little or no regard<br />
to the operating environment.<br />
B – Off-board,<br />
Close Control<br />
Close Control: A form of Mission<br />
Control in which the MAS is<br />
continuously controlled, for<br />
example in speed and heading,<br />
in order for the mission to be<br />
accomplished. Supervision by<br />
the operator is continuous in this<br />
Oversight Condition.<br />
3 – Seek goals<br />
(delegated)<br />
The MAS conducts largely preprogrammed<br />
missions, employing<br />
automation to seek defined goals,<br />
for example: surveying an area,<br />
intercepting a target, or safely<br />
navigating to a location.<br />
C – Off-board,<br />
Loose Control<br />
Loose Control: A form of Mission<br />
Control in which the MAS<br />
determines its own actions, e.g.<br />
speed, heading and the appropriate<br />
tactics required to accomplish the<br />
assigned task. Supervision may<br />
be intermittent in this Oversight<br />
Condition, and one operator may<br />
supervise multiple systems.<br />
4 – Plan,<br />
execute<br />
and exploit<br />
(autonomous)<br />
The MAS can sense the<br />
environment, identify possible<br />
activity, decide and act in order to<br />
achieve the operator’s specified<br />
intent. Depending on the capabilities<br />
of the system, the MAS can<br />
also determine follow-on actions<br />
without recourse to the operator<br />
in order to exploit the situation,<br />
such as shadowing and reporting<br />
a located vessel of interest or<br />
conducting clearance of detected<br />
mine-like objects.<br />
D – None<br />
The MAS is operating without<br />
operator supervision.<br />
MASS UK Industry Conduct Principles and Code of Practice Version 7<br />
21