Diplomarbeit Sebastian Nickel
Diplomarbeit Sebastian Nickel
Diplomarbeit Sebastian Nickel

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel 3. Aktive Frequenzstabilisierung des Flaschenresonators<br />
(a) Modenprofil (b) Fehlersignal<br />
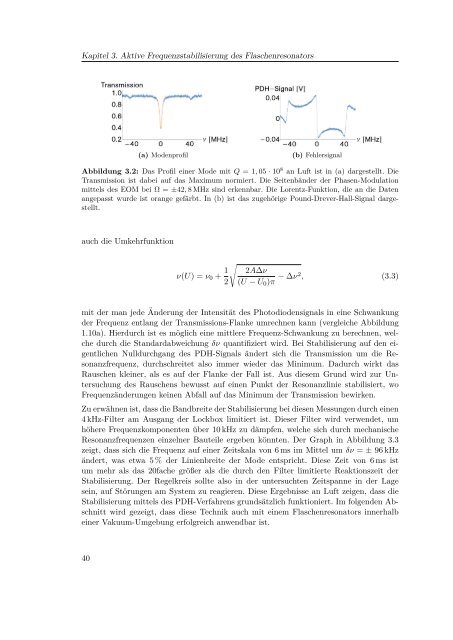
Abbildung 3.2: Das Profil einer Mode mit Q = 1, 05 · 10 8 an Luft ist in (a) dargestellt. Die<br />
Transmission ist dabei auf das Maximum normiert. Die Seitenbänder der Phasen-Modulation<br />
mittels des EOM bei Ω = ±42, 8 MHz sind erkennbar. Die Lorentz-Funktion, die an die Daten<br />
angepasst wurde ist orange gefärbt. In (b) ist das zugehörige Pound-Drever-Hall-Signal dargestellt.<br />
auch die Umkehrfunktion<br />
ν(U) = ν0 + 1<br />
�<br />
2<br />
2A∆ν<br />
(U − U0)π − ∆ν2 , (3.3)<br />
mit der man jede Änderung der Intensität des Photodiodensignals in eine Schwankung<br />
der Frequenz entlang der Transmissions-Flanke umrechnen kann (vergleiche Abbildung<br />
1.10a). Hierdurch ist es möglich eine mittlere Frequenz-Schwankung zu berechnen, welche<br />
durch die Standardabweichung δν quantifiziert wird. Bei Stabilisierung auf den eigentlichen<br />
Nulldurchgang des PDH-Signals ändert sich die Transmission um die Resonanzfrequenz,<br />
durchschreitet also immer wieder das Minimum. Dadurch wirkt das<br />
Rauschen kleiner, als es auf der Flanke der Fall ist. Aus diesem Grund wird zur Untersuchung<br />
des Rauschens bewusst auf einen Punkt der Resonanzlinie stabilisiert, wo<br />
Frequenzänderungen keinen Abfall auf das Minimum der Transmission bewirken.<br />
Zu erwähnen ist, dass die Bandbreite der Stabilisierung bei diesen Messungen durch einen<br />
4 kHz-Filter am Ausgang der Lockbox limitiert ist. Dieser Filter wird verwendet, um<br />
höhere Frequenzkomponenten über 10 kHz zu dämpfen, welche sich durch mechanische<br />
Resonanzfrequenzen einzelner Bauteile ergeben könnten. Der Graph in Abbildung 3.3<br />
zeigt, dass sich die Frequenz auf einer Zeitskala von 6 ms im Mittel um δν = ± 96 kHz<br />
ändert, was etwa 5 % der Linienbreite der Mode entspricht. Diese Zeit von 6 ms ist<br />
um mehr als das 20fache größer als die durch den Filter limitierte Reaktionszeit der<br />
Stabilisierung. Der Regelkreis sollte also in der untersuchten Zeitspanne in der Lage<br />
sein, auf Störungen am System zu reagieren. Diese Ergebnisse an Luft zeigen, dass die<br />
Stabilisierung mittels des PDH-Verfahrens grundsätzlich funktioniert. Im folgenden Abschnitt<br />
wird gezeigt, dass diese Technik auch mit einem Flaschenresonators innerhalb<br />
einer Vakuum-Umgebung erfolgreich anwendbar ist.<br />
40