Diplomarbeit Sebastian Nickel
Diplomarbeit Sebastian Nickel
Diplomarbeit Sebastian Nickel

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Kapitel 3. Aktive Frequenzstabilisierung des Flaschenresonators<br />
(a) Transmissions-Signal bei temperaturabhängigem Drift<br />
(b) Fehler-Signal bei temperaturabhängigem Drift<br />
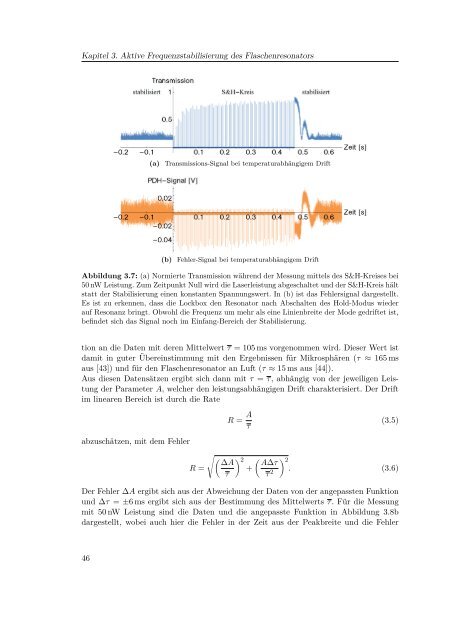
Abbildung 3.7: (a) Normierte Transmission während der Messung mittels des S&H-Kreises bei<br />
50 nW Leistung. Zum Zeitpunkt Null wird die Laserleistung abgeschaltet und der S&H-Kreis hält<br />
statt der Stabilisierung einen konstanten Spannungswert. In (b) ist das Fehlersignal dargestellt.<br />
Es ist zu erkennen, dass die Lockbox den Resonator nach Abschalten des Hold-Modus wieder<br />
auf Resonanz bringt. Obwohl die Frequenz um mehr als eine Linienbreite der Mode gedriftet ist,<br />
befindet sich das Signal noch im Einfang-Bereich der Stabilisierung.<br />
tion an die Daten mit deren Mittelwert τ = 105 ms vorgenommen wird. Dieser Wert ist<br />
damit in guter Übereinstimmung mit den Ergebnissen für Mikrosphären (τ ≈ 165 ms<br />
aus [43]) und für den Flaschenresonator an Luft (τ ≈ 15 ms aus [44]).<br />
Aus diesen Datensätzen ergibt sich dann mit τ = τ, abhängig von der jeweiligen Leistung<br />
der Parameter A, welcher den leistungsabhängigen Drift charakterisiert. Der Drift<br />
im linearen Bereich ist durch die Rate<br />
abzuschätzen, mit dem Fehler<br />
R = A<br />
τ<br />
�<br />
�∆A �2 R = +<br />
τ<br />
(3.5)<br />
�<br />
A∆τ<br />
τ 2<br />
�2 . (3.6)<br />
Der Fehler ∆A ergibt sich aus der Abweichung der Daten von der angepassten Funktion<br />
und ∆τ = ±6 ms ergibt sich aus der Bestimmung des Mittelwerts τ. Für die Messung<br />
mit 50 nW Leistung sind die Daten und die angepasste Funktion in Abbildung 3.8b<br />
dargestellt, wobei auch hier die Fehler in der Zeit aus der Peakbreite und die Fehler<br />
46