MASTER THESIS - Fachhochschule Nordwestschweiz
MASTER THESIS - Fachhochschule Nordwestschweiz
MASTER THESIS - Fachhochschule Nordwestschweiz

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
5.3 KCU Software<br />
5.3.1 Grundlagen<br />
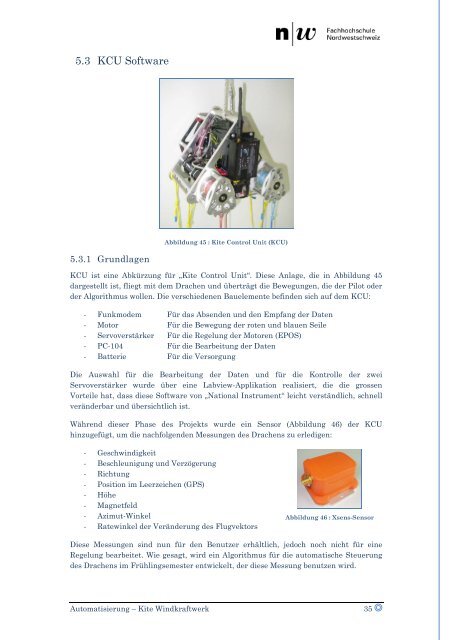
Abbildung 45 : Kite Control Unit (KCU)<br />
KCU ist eine Abkürzung für „Kite Control Unit“. Diese Anlage, die in Abbildung 45<br />
dargestellt ist, fliegt mit dem Drachen und überträgt die Bewegungen, die der Pilot oder<br />
der Algorithmus wollen. Die verschiedenen Bauelemente befinden sich auf dem KCU:<br />
- Funkmodem Für das Absenden und den Empfang der Daten<br />
- Motor Für die Bewegung der roten und blauen Seile<br />
- Servoverstärker Für die Regelung der Motoren (EPOS)<br />
- PC-104 Für die Bearbeitung der Daten<br />
- Batterie Für die Versorgung<br />
Die Auswahl für die Bearbeitung der Daten und für die Kontrolle der zwei<br />
Servoverstärker wurde über eine Labview-Applikation realisiert, die die grossen<br />
Vorteile hat, dass diese Software von „National Instrument“ leicht verständlich, schnell<br />
veränderbar und übersichtlich ist.<br />
Während dieser Phase des Projekts wurde ein Sensor (Abbildung 46) der KCU<br />
hinzugefügt, um die nachfolgenden Messungen des Drachens zu erledigen:<br />
- Geschwindigkeit<br />
- Beschleunigung und Verzögerung<br />
- Richtung<br />
- Position im Leerzeichen (GPS)<br />
- Höhe<br />
- Magnetfeld<br />
- Azimut-Winkel<br />
- Ratewinkel der Veränderung des Flugvektors<br />
Abbildung 46 : Xsens-Sensor<br />
Diese Messungen sind nun für den Benutzer erhältlich, jedoch noch nicht für eine<br />
Regelung bearbeitet. Wie gesagt, wird ein Algorithmus für die automatische Steuerung<br />
des Drachens im Frühlingsemester entwickelt, der diese Messung benutzen wird.<br />
Automatisierung – Kite Windkraftwerk 35