Intelligent Transport Systems - Telenor
Intelligent Transport Systems - Telenor
Intelligent Transport Systems - Telenor

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6<br />
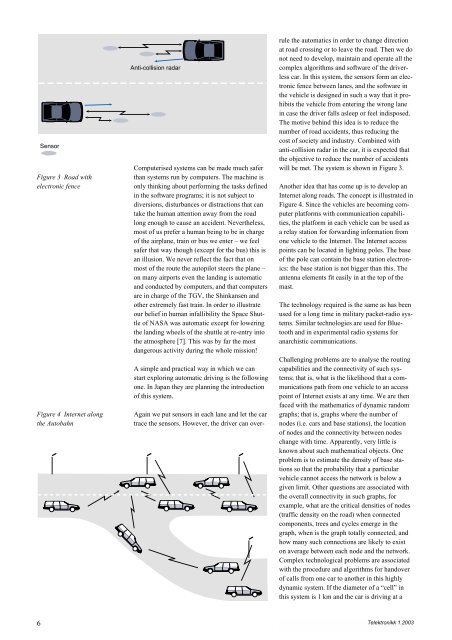
Sensor<br />
Figure 3 Road with<br />
electronic fence<br />
Figure 4 Internet along<br />
the Autobahn<br />
Anti-collision radar<br />
Computerised systems can be made much safer<br />
than systems run by computers. The machine is<br />
only thinking about performing the tasks defined<br />
in the software programs; it is not subject to<br />
diversions, disturbances or distractions that can<br />
take the human attention away from the road<br />
long enough to cause an accident. Nevertheless,<br />
most of us prefer a human being to be in charge<br />
of the airplane, train or bus we enter – we feel<br />
safer that way though (except for the bus) this is<br />
an illusion. We never reflect the fact that on<br />
most of the route the autopilot steers the plane –<br />
on many airports even the landing is automatic<br />
and conducted by computers, and that computers<br />
are in charge of the TGV, the Shinkansen and<br />
other extremely fast train. In order to illustrate<br />
our belief in human infallibility the Space Shuttle<br />
of NASA was automatic except for lowering<br />
the landing wheels of the shuttle at re-entry into<br />
the atmosphere [7]. This was by far the most<br />
dangerous activity during the whole mission!<br />
A simple and practical way in which we can<br />
start exploring automatic driving is the following<br />
one. In Japan they are planning the introduction<br />
of this system.<br />
Again we put sensors in each lane and let the car<br />
trace the sensors. However, the driver can over-<br />
rule the automatics in order to change direction<br />
at road crossing or to leave the road. Then we do<br />
not need to develop, maintain and operate all the<br />
complex algorithms and software of the driverless<br />
car. In this system, the sensors form an electronic<br />
fence between lanes, and the software in<br />
the vehicle is designed in such a way that it prohibits<br />
the vehicle from entering the wrong lane<br />
in case the driver falls asleep or feel indisposed.<br />
The motive behind this idea is to reduce the<br />
number of road accidents, thus reducing the<br />
cost of society and industry. Combined with<br />
anti-collision radar in the car, it is expected that<br />
the objective to reduce the number of accidents<br />
will be met. The system is shown in Figure 3.<br />
Another idea that has come up is to develop an<br />
Internet along roads. The concept is illustrated in<br />
Figure 4. Since the vehicles are becoming computer<br />
platforms with communication capabilities,<br />
the platform in each vehicle can be used as<br />
a relay station for forwarding information from<br />
one vehicle to the Internet. The Internet access<br />
points can be located in lighting poles. The base<br />
of the pole can contain the base station electronics:<br />
the base station is not bigger than this. The<br />
antenna elements fit easily in at the top of the<br />
mast.<br />
The technology required is the same as has been<br />
used for a long time in military packet-radio systems.<br />
Similar technologies are used for Bluetooth<br />
and in experimental radio systems for<br />
anarchistic communications.<br />
Challenging problems are to analyse the routing<br />
capabilities and the connectivity of such systems;<br />
that is, what is the likelihood that a communications<br />
path from one vehicle to an access<br />
point of Internet exists at any time. We are then<br />
faced with the mathematics of dynamic random<br />
graphs; that is, graphs where the number of<br />
nodes (i.e. cars and base stations), the location<br />
of nodes and the connectivity between nodes<br />
change with time. Apparently, very little is<br />
known about such mathematical objects. One<br />
problem is to estimate the density of base stations<br />
so that the probability that a particular<br />
vehicle cannot access the network is below a<br />
given limit. Other questions are associated with<br />
the overall connectivity in such graphs, for<br />
example, what are the critical densities of nodes<br />
(traffic density on the road) when connected<br />
components, trees and cycles emerge in the<br />
graph, when is the graph totally connected, and<br />
how many such connections are likely to exist<br />
on average between each node and the network.<br />
Complex technological problems are associated<br />
with the procedure and algorithms for handover<br />
of calls from one car to another in this highly<br />
dynamic system. If the diameter of a “cell” in<br />
this system is 1 km and the car is driving at a<br />
Telektronikk 1.2003