

Gemini GV6K and Gemini GT6K Programmer's Guide
Gemini GV6K and Gemini GT6K Programmer's Guide
Gemini GV6K and Gemini GT6K Programmer's Guide

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
S-Curve Profiling<br />
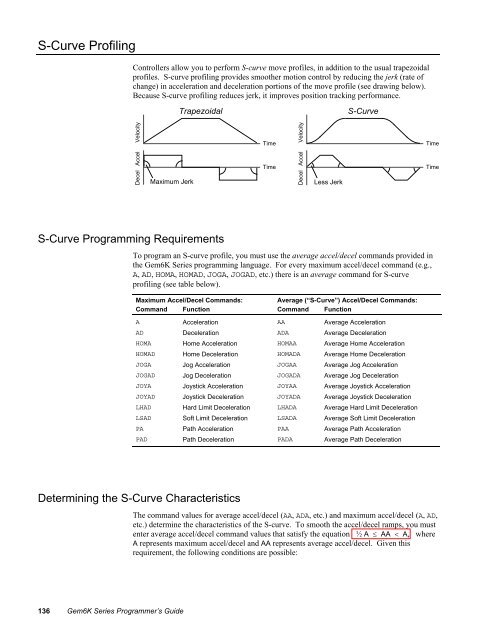
Controllers allow you to perform S-curve move profiles, in addition to the usual trapezoidal<br />
profiles. S-curve profiling provides smoother motion control by reducing the jerk (rate of<br />
change) in acceleration <strong>and</strong> deceleration portions of the move profile (see drawing below).<br />
Because S-curve profiling reduces jerk, it improves position tracking performance.<br />
Trapezoidal<br />
S-Curve<br />
Decel Accel Velocity<br />
Maximum Jerk<br />
Time<br />
Time<br />
Velocity<br />
Decel Accel<br />
Less Jerk<br />
Time<br />
Time<br />
S-Curve Programming Requirements<br />
To program an S-curve profile, you must use the average accel/decel comm<strong>and</strong>s provided in<br />
the Gem6K Series programming language. For every maximum accel/decel comm<strong>and</strong> (e.g.,<br />
A, AD, HOMA, HOMAD, JOGA, JOGAD, etc.) there is an average comm<strong>and</strong> for S-curve<br />
profiling (see table below).<br />
Maximum Accel/Decel Comm<strong>and</strong>s:<br />
Comm<strong>and</strong> Function<br />
Average (“S-Curve”) Accel/Decel Comm<strong>and</strong>s:<br />
Comm<strong>and</strong> Function<br />
A Acceleration AA Average Acceleration<br />
AD Deceleration ADA Average Deceleration<br />
HOMA Home Acceleration HOMAA Average Home Acceleration<br />
HOMAD Home Deceleration HOMADA Average Home Deceleration<br />
JOGA Jog Acceleration JOGAA Average Jog Acceleration<br />
JOGAD Jog Deceleration JOGADA Average Jog Deceleration<br />
JOYA Joystick Acceleration JOYAA Average Joystick Acceleration<br />
JOYAD Joystick Deceleration JOYADA Average Joystick Deceleration<br />
LHAD Hard Limit Deceleration LHADA Average Hard Limit Deceleration<br />
LSAD Soft Limit Deceleration LSADA Average Soft Limit Deceleration<br />
PA Path Acceleration PAA Average Path Acceleration<br />
PAD Path Deceleration PADA Average Path Deceleration<br />
Determining the S-Curve Characteristics<br />
The comm<strong>and</strong> values for average accel/decel (AA, ADA, etc.) <strong>and</strong> maximum accel/decel (A, AD,<br />
etc.) determine the characteristics of the S-curve. To smooth the accel/decel ramps, you must<br />
enter average accel/decel comm<strong>and</strong> values that satisfy the equation ½ A ≤ AA < A, where<br />
A represents maximum accel/decel <strong>and</strong> AA represents average accel/decel. Given this<br />
requirement, the following conditions are possible:<br />
136 Gem6K Series Programmer’s <strong>Guide</strong>














