

Gemini GV6K and Gemini GT6K Programmer's Guide
Gemini GV6K and Gemini GT6K Programmer's Guide
Gemini GV6K and Gemini GT6K Programmer's Guide

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
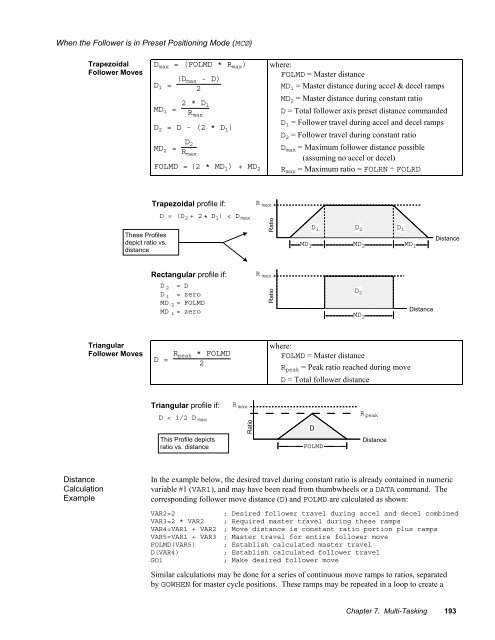
When the Follower is in Preset Positioning Mode (MCØ)<br />
Trapezoidal<br />
Follower Moves<br />
D max = (FOLMD * R max )<br />
D 1 = (D max - D)<br />
2<br />
MD 1 = 2 * D 1<br />
R max<br />
D 2 = D - (2 * D 1 )<br />
MD 2 = D 2<br />
R max<br />
FOLMD = (2 * MD 1 ) + MD 2<br />
where:<br />
FOLMD = Master distance<br />
MD 1 = Master distance during accel & decel ramps<br />
MD 2 = Master distance during constant ratio<br />
D = Total follower axis preset distance comm<strong>and</strong>ed<br />
D 1 = Follower travel during accel <strong>and</strong> decel ramps<br />
D 2 = Follower travel during constant ratio<br />
D max = Maximum follower distance possible<br />
(assuming no accel or decel)<br />
R max = Maximum ratio = FOLRN ÷ FOLRD<br />
These Profiles<br />
depict ratio vs.<br />
distance<br />
Trapezoidal profile if:<br />
D = (D 2 + 2 * D 1 ) < D max<br />
Rectangular profile if:<br />
D 2 = D<br />
D 1 = zero<br />
MD 2 = FOLMD<br />
MD 1 = zero<br />
R max<br />
Ratio Ratio<br />
R max<br />
D 1 D 2 D 1<br />
MD 1 MD 2 MD 1<br />
Distance<br />
D 2<br />
MD 2<br />
Distance<br />
Triangular<br />
Follower Moves<br />
D = R peak * FOLMD<br />
2<br />
where:<br />
FOLMD = Master distance<br />
R peak = Peak ratio reached during move<br />
D = Total follower distance<br />
Triangular profile if:<br />
R max<br />
D < 1/2 D max<br />
Ratio<br />
D<br />
R peak<br />
This Profile depicts<br />
ratio vs. distance<br />
FOLMD<br />
Distance<br />
Distance<br />
Calculation<br />
Example<br />
In the example below, the desired travel during constant ratio is already contained in numeric<br />
variable #1 (VAR1), <strong>and</strong> may have been read from thumbwheels or a DATA comm<strong>and</strong>. The<br />
corresponding follower move distance (D) <strong>and</strong> FOLMD are calculated as shown:<br />
VAR2=2<br />
; Desired follower travel during accel <strong>and</strong> decel combined<br />
VAR3=2 * VAR2 ; Required master travel during these ramps<br />
VAR4=VAR1 + VAR2 ; Move distance is constant ratio portion plus ramps<br />
VAR5=VAR1 + VAR3 ; Master travel for entire follower move<br />
FOLMD(VAR5) ; Establish calculated master travel<br />
D(VAR4)<br />
; Establish calculated follower travel<br />
GO1<br />
; Make desired follower move<br />
Similar calculations may be done for a series of continuous move ramps to ratios, separated<br />
by GOWHEN for master cycle positions. These ramps may be repeated in a loop to create a<br />
Chapter 7. Multi-Tasking 193














