

Gemini GV6K and Gemini GT6K Programmer's Guide
Gemini GV6K and Gemini GT6K Programmer's Guide
Gemini GV6K and Gemini GT6K Programmer's Guide

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
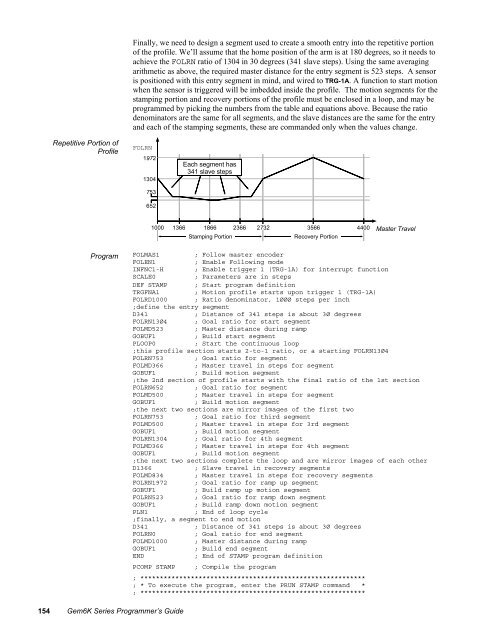
Finally, we need to design a segment used to create a smooth entry into the repetitive portion<br />
of the profile. We’ll assume that the home position of the arm is at 180 degrees, so it needs to<br />
achieve the FOLRN ratio of 1304 in 30 degrees (341 slave steps). Using the same averaging<br />
arithmetic as above, the required master distance for the entry segment is 523 steps. A sensor<br />
is positioned with this entry segment in mind, <strong>and</strong> wired to TRG-1A. A function to start motion<br />
when the sensor is triggered will be imbedded inside the profile. The motion segments for the<br />
stamping portion <strong>and</strong> recovery portions of the profile must be enclosed in a loop, <strong>and</strong> may be<br />
programmed by picking the numbers from the table <strong>and</strong> equations above. Because the ratio<br />
denominators are the same for all segments, <strong>and</strong> the slave distances are the same for the entry<br />
<strong>and</strong> each of the stamping segments, these are comm<strong>and</strong>ed only when the values change.<br />
Repetitive Portion of<br />
Profile<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
<br />
Program FOLMAS1 ; Follow master encoder<br />
FOLEN1<br />
; Enable Following mode<br />
INFNC1-H ; Enable trigger 1 (TRG-1A) for interrupt function<br />
SCALE0<br />
; Parameters are in steps<br />
DEF STAMP ; Start program definition<br />
TRGFNA1<br />
; Motion profile starts upon trigger 1 (TRG-1A)<br />
FOLRD1000 ; Ratio denominator, 1ØØØ steps per inch<br />
;define the entry segment<br />
D341<br />
; Distance of 341 steps is about 3Ø degrees<br />
FOLRN13Ø4 ; Goal ratio for start segment<br />
FOLMD523 ; Master distance during ramp<br />
GOBUF1<br />
; Build start segment<br />
PLOOP0<br />
; Start the continuous loop<br />
;this profile section starts 2-to-1 ratio, or a starting FOLRN13Ø4<br />
FOLRN753 ; Goal ratio for segment<br />
FOLMD366 ; Master travel in steps for segment<br />
GOBUF1<br />
; Build motion segment<br />
;the 2nd section of profile starts with the final ratio of the 1st section<br />
FOLRN652 ; Goal ratio for segment<br />
FOLMD500 ; Master travel in steps for segment<br />
GOBUF1<br />
; Build motion segment<br />
;the next two sections are mirror images of the first two<br />
FOLRN753 ; Goal ratio for third segment<br />
FOLMD500 ; Master travel in steps for 3rd segment<br />
GOBUF1<br />
; Build motion segment<br />
FOLRN1304 ; Goal ratio for 4th segment<br />
FOLMD366 ; Master travel in steps for 4th segment<br />
GOBUF1<br />
; Build motion segment<br />
;the next two sections complete the loop <strong>and</strong> are mirror images of each other<br />
D1366<br />
; Slave travel in recovery segments<br />
FOLMD834 ; Master travel in steps for recovery segments<br />
FOLRN1972 ; Goal ratio for ramp up segment<br />
GOBUF1<br />
; Build ramp up motion segment<br />
FOLRN523 ; Goal ratio for ramp down segment<br />
GOBUF1<br />
; Build ramp down motion segment<br />
PLN1<br />
; End of loop cycle<br />
;finally, a segment to end motion<br />
D341<br />
; Distance of 341 steps is about 3Ø degrees<br />
FOLRN0<br />
; Goal ratio for end segment<br />
FOLMD1000 ; Master distance during ramp<br />
GOBUF1<br />
; Build end segment<br />
END<br />
; End of STAMP program definition<br />
PCOMP STAMP ; Compile the program<br />
; **********************************************************<br />
; * To execute the program, enter the PRUN STAMP comm<strong>and</strong> *<br />
; **********************************************************<br />
154 Gem6K Series Programmer’s <strong>Guide</strong>














