1+2/2010 - SpoleÄnost pro pojivové tkánÄ›
1+2/2010 - SpoleÄnost pro pojivové tkánÄ›
1+2/2010 - SpoleÄnost pro pojivové tkánÄ›

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
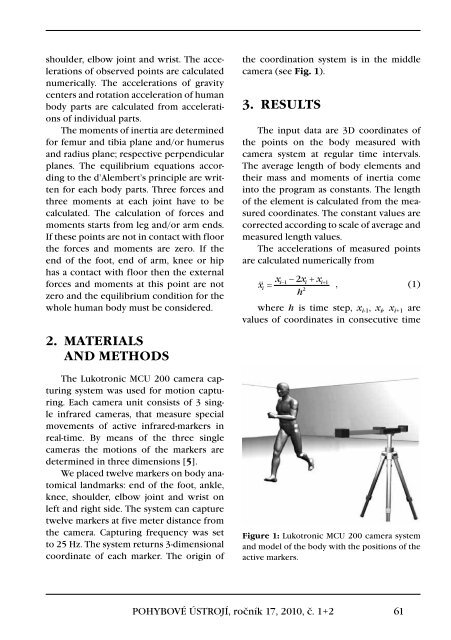
shoulder, elbow joint and wrist. The accelerationsof observed points are calculatednumerically. The accelerations of gravitycenters and rotation acceleration of humanbody parts are calculated from accelerationsof individual parts.The moments of inertia are determinedfor femur and tibia plane and/or humerusand radius plane; respective perpendicularplanes. The equilibrium equations accordingto the d’Alembert’s principle are writtenfor each body parts. Three forces andthree moments at each joint have to becalculated. The calculation of forces andmoments starts from leg and/or arm ends.If these points are not in contact with floorthe forces and moments are zero. If theend of the foot, end of arm, knee or hiphas a contact with floor then the externalforces and moments at this point are notzero and the equilibrium condition for thewhole human body must be considered.2. Materialsand methodsThe Lukotronic MCU 200 camera capturingsystem was used for motion capturing.Each camera unit consists of 3 singleinfrared cameras, that measure specialmovements of active infrared-markers inreal-time. By means of the three singlecameras the motions of the markers aredetermined in three dimensions [5].We placed twelve markers on body anatomicallandmarks: end of the foot, ankle,knee, shoulder, elbow joint and wrist onleft and right side. The system can capturetwelve markers at five meter distance fromthe camera. Capturing frequency was setto 25 Hz. The system returns 3‐dimensionalcoordinate of each marker. The origin ofthe coordination system is in the middlecamera (see Fig. 1).3. ResultsThe input data are 3D coordinates ofthe points on the body measured withcamera system at regular time intervals.The average length of body elements andtheir mass and moments of inertia comeinto the <strong>pro</strong>gram as constants. The lengthof the element is calculated from the measuredcoordinates. The constant values arecorrected according to scale of average andmeasured length values.The accelerations of measured pointsare calculated numerically from, (1)where h is time step, x i-1 , x i , x i+1 arevalues of coordinates in consecutive timeFigure 1: Lukotronic MCU 200 camera systemand model of the body with the positions of theactive markers.POHYBOVÉ ÚSTROJÍ, ročník 17, <strong>2010</strong>, č. <strong>1+2</strong> 61