108fuzzy.hpp : Archivo que acompaña a UNFUZZYfuzzy.cpp : Archivo que acompaña a UNFUZZYdif.hpp : Contiene los encabezados de las clases controlador1, controlador2,controlador3 y controlador4.dif1.cpp : Contiene el constructor de la clase controlador1.dif2.cpp : Contiene el constructor de la clase controlador2.dif3.cpp : Contiene el constructor de la clase controlador3.dif4.cpp : Contiene el constructor de la clase controlador4.De esos archivos, sólo fue necesario digitar pendulo.cpp, y crear pendulo.rc,ya que fuzzy.hpp y fuzzy.cpp se entregan junto con UNFUZZY, en tanto quedif.hpp, dif1.cpp, dif2.cpp, dif3.cpp y dif4.cpp contienen código que fuecreado con la opción Generar Código de UNFUZZY.El procedimiento para crear los archivos dif.hpp, dif1.cpp, dif2.cpp, dif3.cpp ydif4.cpp fue el siguiente :1. Empleando UNFUZZY, se diseñaron los cuatro controladores presentadosen el numeral 5.1.2.1. Para cada uno de los cuatro controladores, se empleó la opción GenerarCódigo para generar código C++ ; las clases generadas tienen por nombrecontrolador1, controlador2, controlador3 y controlador4; El códigogenerado se salvó en los archivos dif1.cpp, dif2.cpp, dif3.cpp y dif4.cpp.1. De cada uno de los archivos dif1.cpp, dif2.cpp, dif3.cpp y dif4.cpp se retiróla función main(), que se incluye en ellos como ejemplo de utilización.1. De cada uno de los archivos dif1.cpp, dif2.cpp, dif3.cpp y dif4.cpp se tomóel prototipo de las clases controlador1, controlador2, controlador3 ycontrolador4, y se trasladó a un nuevo archivo dif.hpp1. Se modificó la instrucción #include que originalmente estabaen los archivos dif1.cpp, dif2.cpp, dif3.cpp y dif4.cpp, por la instrucción#include.1. En el archivo dif.hpp se incluyó la instrucción #include5.1.4. Resultados
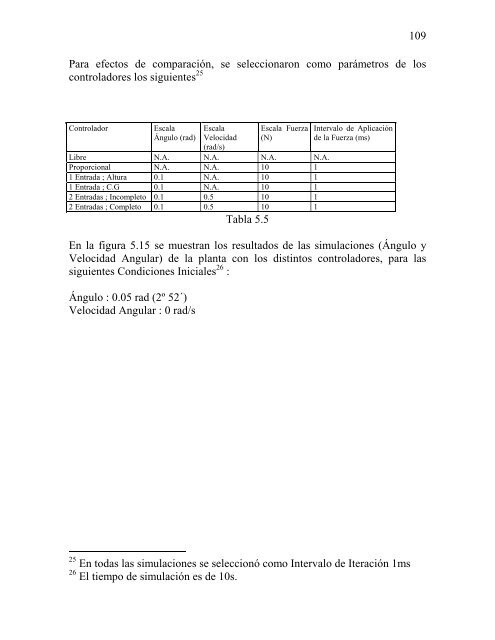
109Para efectos de comparación, se seleccionaron como parámetros de loscontroladores los siguientes 25ControladorEscalaÁngulo (rad)EscalaVelocidad(rad/s)Escala Fuerza(N)Libre N.A. N.A. N.A. N.A.Proporcional N.A. N.A. 10 11 Entrada ; Altura 0.1 N.A. 10 11 Entrada ; C.G 0.1 N.A. 10 12 Entradas ; Incompleto 0.1 0.5 10 12 Entradas ; Completo 0.1 0.5 10 1Tabla 5.5Intervalo de Aplicaciónde la Fuerza (ms)En la figura 5.15 se muestran los resultados de las simulaciones (Ángulo yVelocidad Angular) de la planta con los distintos controladores, para lassiguientes Condiciones Iniciales 26 :Ángulo : 0.05 rad (2º 52´)Velocidad Angular : 0 rad/s25 En todas las simulaciones se seleccionó como Intervalo de Iteración 1ms26 El tiempo de simulación es de 10s.