- Page 1 and 2:
UNIVERSIDAD NACIONAL DECOLOMBIAFACU
- Page 3 and 4:
10. INTRODUCCIÓNEste texto corresp
- Page 5 and 6:
31. CONCEPTOS BÁSICOSEn el context
- Page 7 and 8:
Una S-Norma es una función denotad
- Page 9 and 10:
71.1.7. ImplicaciónLa implicación
- Page 11 and 12:
91.2.2. DifusorFigura 1.3 Valores L
- Page 13 and 14:
11Supóngase que el Difusor produce
- Page 15 and 16:
2. Estructura de las Variables Ling
- Page 17 and 18:
Este algoritmo permite determinar l
- Page 19 and 20:
9. Especificar para cada regla cuá
- Page 21 and 22:
1. Calcular los valores concretos d
- Page 23 and 24:
Los propósitos de cada uno de los
- Page 25 and 26:
23Figura 2.7 Regla2.2.1.4.Bloque de
- Page 27 and 28:
Figura 2.10 Módulo de Edición25
- Page 29 and 30:
27Archivo del EncabezadoArchivos co
- Page 31 and 32:
293.1.2. Clase Difusor y derivadasL
- Page 33 and 34:
31ProductoAcotadoFamiliaTpFamiliaHp
- Page 35 and 36:
33ImplicacionGodelImplicacionAgudaI
- Page 37 and 38:
35*var)numeroVariables() int permit
- Page 39 and 40:
37composicion() Norma* Consultor de
- Page 41 and 42:
39Nombre Descripción 14PrimerMaxim
- Page 43 and 44:
413.2. Clases de ConsultaLas Clases
- Page 45 and 46:
43familias de T-Normas ; se emplea
- Page 47 and 48:
454.1.2. InstalaciónLos discos que
- Page 49 and 50:
47Entrada 3 : 57. Número de Valore
- Page 51 and 52:
49Figura 4.5 Cuadro de Diálogo Cal
- Page 53 and 54:
51Figura 4.6 Cuadro de Diálogo Cal
- Page 55 and 56:
53Figura 4.7 Cuadro de Diálogo Def
- Page 57 and 58:
554.1.3.5.Modificaciones a la Máqu
- Page 59 and 60:
574.1.3.7.Generación de Código Fu
- Page 61 and 62: 59Tipo GammaTipo ZCampanaPiCampanaT
- Page 63 and 64: 61MáximoSuma AcotadaSuma Drástica
- Page 65 and 66: Entrada y Salida, así como la de l
- Page 67 and 68: 654.3.1.2.Autodefinición de Univer
- Page 69 and 70: El botón Definir Variable invoca e
- Page 71 and 72: evaluación la hace sobre un conjun
- Page 73 and 74: 714.3.1.3.12.Autodefinir VariableEl
- Page 75 and 76: Diálogo Definición Rápida de Reg
- Page 77 and 78: del Consecuente; hay también dos r
- Page 79 and 80: 1. Seleccione el primer término de
- Page 81 and 82: 794.4. Análisis e implementación
- Page 83 and 84: Adicionalmente, UNFUZZY indica que
- Page 85 and 86: 83Figura 4.26 Cuadro de Diálogo Fu
- Page 87 and 88: 85Figura 4.27 Cuadro de Diálogo Ge
- Page 89 and 90: 87Figura 4.29 Cuadro de Diálogo En
- Page 91 and 92: errores debidos a que algunas funci
- Page 93 and 94: Una de las principales ventajas que
- Page 95 and 96: 93Figura 5.1 Péndulo InvertidoLas
- Page 97 and 98: 955.1.2. Diseño del controlador di
- Page 99 and 100: 97Número de reglas: 3Regla 1:IF Á
- Page 101 and 102: 99Figura 5.6 Relación Entrada-Sali
- Page 103 and 104: 101Operador AND: MínimoOperador de
- Page 105 and 106: 103Funciones de Pertenencia de la V
- Page 107 and 108: 105Figura 5.12 Cuadro de Diálogo P
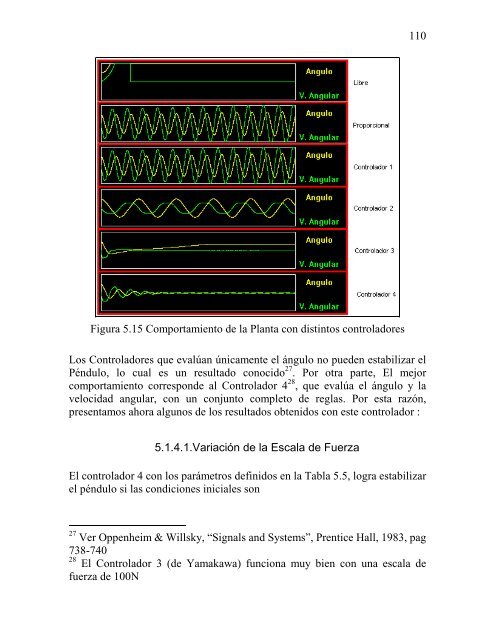
- Page 109 and 110: 107Ángulo : [-a,a], donde a es Esc
- Page 111: 109Para efectos de comparación, se
- Page 115 and 116: 113El problema de Identificación d
- Page 117 and 118: 115Número de Variables de Entrada:
- Page 119 and 120: 1175.2.2.4.Modelo 4 345.2.2.4.1.Uni
- Page 121 and 122: 119Al seleccionar la opción Modelo
- Page 123 and 124: 121dif.hpp, dif1.cpp, dif2.cpp, dif
- Page 125 and 126: 123Figura 5.24 Efecto de alterar el
- Page 127 and 128: 1251979 15.95 14.64 31.39 33.36 44.
- Page 129 and 130: 1275.3.3. Software de simulaciónPa
- Page 131 and 132: 129Figura 5.27 Cuadro de Diálogo P
- Page 133 and 134: 1315.3.4. ResultadosLa figura 5.28
- Page 135 and 136: 133Figura 5.30 Efecto de alterar el
- Page 137 and 138: 135Plantas y Predicción de Series
- Page 139 and 140: 137Los programas de computador disp
- Page 141 and 142: 1396.4.2. Mejorando UNFUZZYLas vers
- Page 143 and 144: 141comportamiento frente a otras po
- Page 145 and 146: 143Lin, Chin-Teng & Lee, George.
- Page 147 and 148: 145TABLA DE CONTENIDO0. introducci
- Page 149 and 150: 1474.6.2. Código C++ _____________
- Page 151 and 152: 149LISTA DE FIGURASFigura 1.1 Funci