Polycopié 2013 - mms2 - MINES ParisTech
Polycopié 2013 - mms2 - MINES ParisTech
Polycopié 2013 - mms2 - MINES ParisTech

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
1.1. DÉFINITIONS 7<br />
Elle est diagonalisable. Il existe donc des directions centrales principales, pour lesquelles<br />
on définit les moments quadratiques centraux principaux<br />
⎛ ∫<br />
⎞<br />
( ) I<br />
⎜ 2 = x 2 3dS 0<br />
I = S<br />
⎝<br />
∫ ⎟<br />
⎠ (1.5)<br />
0 I 3 = x 3 2dS<br />
Pour la suite du chapitre, on travaillera dans les axes ainsi définis. Dans le cas où la<br />
section présente deux axes de symétrie, ceux-ci correspondent bien entendu aux directions<br />
principales.<br />
1.1.2 Principe de Saint-Venant<br />
Le traitement de la théorie des poutres s’appuie sur le principe de Saint-Venant formulé<br />
en 1855 [4, 1]. Dans le cas de matériaux élastiques linéaires, il s’agit d’un théorème dont<br />
on peut trouver une démonstration dans [12]. Il est alors démontré qu’une distribution<br />
d’efforts extérieurs appliquée sur une section á l’une des extrêmités de Ω n’a qu’un effet<br />
localisé au voisinage de cette section, si la résultante et le moment des efforts appliqués<br />
sont nuls.<br />
Ce principe peut être reformulé de la façon suivante : pour les milieux élancé, l’état<br />
mécanique en des points suffisamment éloignés des points d’application des charges<br />
extérieures ne dépend que du torseur résultant des efforts extérieurs.<br />
On en déduit que seul le torseur des efforts intérieurs intervient dans le travail virtuel des<br />
efforts intérieurs, si l’on se place hors de l’effet local des conditions aux limites.<br />
Dans la pratique, la solution donnée par la théorie des poutres est valable lorsqu’on a<br />
parcouru sur la ligne moyenne une distance qui est de l’ordre de deux à trois diamètres,<br />
si bien que la schématisation de type poutre est en général acceptée à partir d’un rapport<br />
10 à 15 entre la longueur et la plus grande dimension de la section droite.<br />
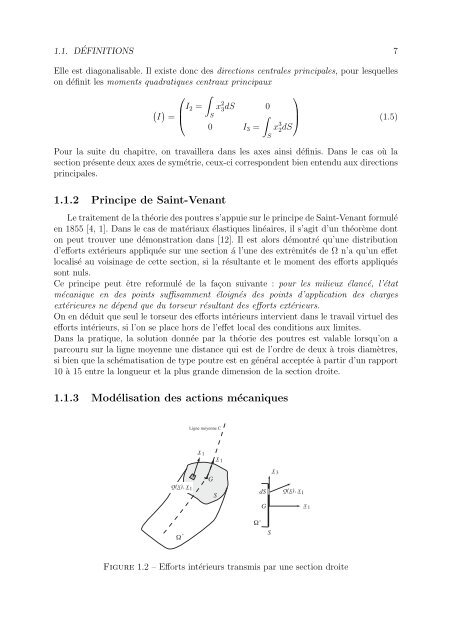
1.1.3 Modélisation des actions mécaniques<br />
S<br />
Ligne moyenne C<br />
_ x 1<br />
_ x 1<br />
G<br />
σ(x). x 1 ~ _ _ S<br />
dS<br />
_ x 3<br />
σ(x). ~ _ _ x 1<br />
G<br />
_ x 1<br />
Ω<br />
-<br />
Ω-<br />
S<br />
Figure 1.2 – Efforts intérieurs transmis par une section droite