2006(â1)
2006(â1)
2006(â1)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
ВФ<br />
x1 ( n ) x1 ( n − 1)<br />
x1 ( n − K + 1)<br />
T T T<br />
T<br />
v 11 v 12<br />
v 1i<br />
v 1( N − 1)<br />
v 1N<br />
Σ<br />
z 1<br />
ПФ<br />
k 1<br />
x2 ( n ) x2 ( n − 1)<br />
x2 ( n − K + 1)<br />
T T T T<br />
v 21 v 22<br />
v 2i<br />
v 2( N − 1)<br />
v 2N<br />
Σ<br />
z 2<br />
k 2<br />
Σ<br />
( ) y n<br />
xM ( n ) xM<br />
( n − 1)<br />
xM<br />
( n − K + 1)<br />
T T T T<br />
v M1 v M 2<br />
v Mi<br />
v M ( N − 1)<br />
v MN<br />
Σ<br />
z M<br />
k M<br />
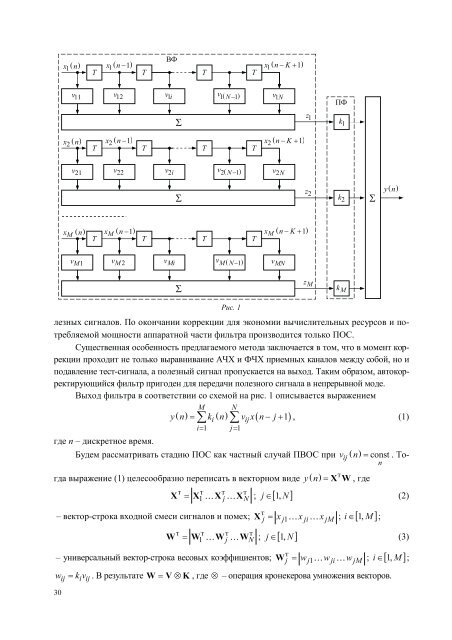
лезных сигналов. По окончании коррекции для экономии вычислительных ресурсов и потребляемой<br />
мощности аппаратной части фильтра производится только ПОС.<br />
Существенная особенность предлагаемого метода заключается в том, что в момент коррекции<br />
проходит не только выравнивание АЧХ и ФЧХ приемных каналов между собой, но и<br />
подавление тест-сигнала, а полезный сигнал пропускается на выход. Таким образом, автокорректирующийся<br />
фильтр пригоден для передачи полезного сигнала в непрерывной моде.<br />
Выход фильтра в соответствии со схемой на рис. 1 описывается выражением<br />
M N<br />
y ( n) = ∑ ki<br />
( n) ∑ vij<br />
x( n − j + 1)<br />
, (1)<br />
i= 1 j=<br />
1<br />
где n – дискретное время.<br />
30<br />
Будем рассматривать стадию ПОС как частный случай ПВОС при vij<br />
( n ) = const . То-<br />
n<br />
гда выражение (1) целесообразно переписать в векторном виде ( ) т<br />
y n = X W , где<br />
т т т т<br />
X = X1 X j XN<br />
… … ; j [ 1, N ]<br />
– вектор-строка входной смеси сигналов и помех;<br />
т т т т<br />
W = W1 Wj WN<br />
∈ (2)<br />
т<br />
j = x j1<br />
x ji x jM<br />
… … ; j [ 1, N ]<br />
– универсальный вектор-строка весовых коэффициентов;<br />
wij<br />
kivij<br />
Рис. 1<br />
X … … ; i [ 1, M ]<br />
∈ ;<br />
∈ (3)<br />
т<br />
j = wj1<br />
w ji wjM<br />
W … … ; i [ 1, M ]<br />
∈ ;<br />
= . В результате W = V ⊗ K , где ⊗ – операция кронекерова умножения векторов.