


You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
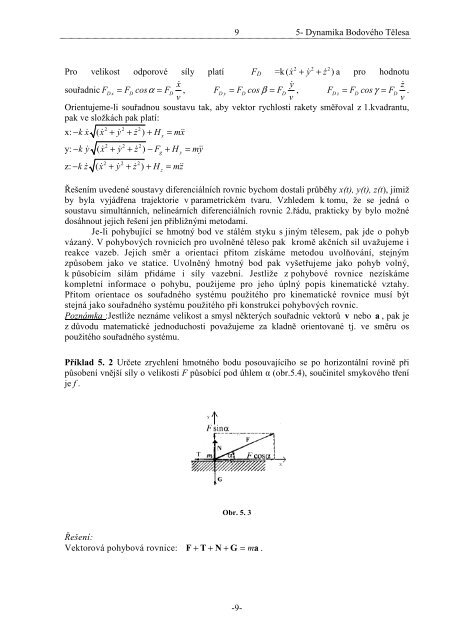
95- <strong>Dynamika</strong> Bodového Tělesa2 2 2Pro velikost odporové síly platí F D =k ( xɺ + yɺ + zɺ ) a pro hodnotuxɺ yɺ zɺ souřadnic F D x= F Dcosα= F D , FD y= FD cos β = FD, FD z= FD cos γ = FD.vvvOrientujeme-li souřadnou soustavu tak, aby vektor rychlosti rakety směřoval z 1.kvadrantu,pak ve složkách pak platí:2 2 2x: − k xɺ ( xɺ + yɺ + zɺ) + Hx= mx ɺɺ2 2 2y: − k yɺ ( xɺ + yɺ + zɺ) − Fg + Hy= my ɺɺ2 2 2z: − k zɺ ( xɺ+ yɺ+ zɺ ) + Hz= mz ɺɺŘešením uvedené soustavy diferenciálních rovnic bychom dostali průběhy x(t), y(t), z(t), jimižby byla vyjádřena trajektorie v parametrickém tvaru. Vzhledem k tomu, že se jedná osoustavu simultánních, nelineárních diferenciálních rovnic 2.řádu, prakticky by bylo možnédosáhnout jejich řešení jen přibližnými metodami.Je-li pohybující se hmotný bod ve stálém styku s jiným tělesem, pak jde o pohybvázaný. V pohybových rovnicích pro uvolněné těleso pak kromě akčních sil uvažujeme ireakce vazeb. Jejich směr a orientaci přitom získáme metodou uvolňování, stejnýmzpůsobem jako ve statice. Uvolněný hmotný bod pak vyšetřujeme jako pohyb volný,k působícím silám přidáme i síly vazební. Jestliže z pohybové rovnice nezískámekompletní informace o pohybu, použijeme pro jeho úplný popis kinematické vztahy.Přitom orientace os souřadného systému použitého pro kinematické rovnice musí býtstejná jako souřadného systému použitého při konstrukci pohybových rovnic.Poznámka :Jestliže neznáme velikost a smysl některých souřadnic vektorů v nebo a , pak jez důvodu matematické jednoduchosti považujeme za kladně orientované tj. ve směru ospoužitého souřadného systému.Příklad 5. 2 Určete zrychlení hmotného bodu posouvajícího se po horizontální rovině připůsobení vnější síly o velikosti F působící pod úhlem α (obr.5.4), součinitel smykového třeníje f .Obr. 5. 3Řešení:Vektorová pohybová rovnice:F + T + N + G = ma .-9-













