Pogoni u robotici Pogoni u robotici - FER-a - Sveučilište u Zagrebu
Pogoni u robotici Pogoni u robotici - FER-a - Sveučilište u Zagrebu
Pogoni u robotici Pogoni u robotici - FER-a - Sveučilište u Zagrebu

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
<strong>Pogoni</strong> u <strong>robotici</strong><br />
• Planiranje trajektorije � generiranje reference<br />
(pozicije, brzine, ubrzanja) uz uvažavanje ograničenja<br />
svakog zgloba<br />
• Upravljanje zglobom ≡ upravljanje motorom u zglobu i<br />
radnim mehanizmom pričvršćenim na osovinu motora �<br />
upravljanje slijednim sustavom<br />
• Osnovne veličine s kojima se upravlja: položaj, brzina,<br />
moment (tj. struja), sila dodira<br />
• Mehanički prijenos (reduktor) � smanjuje brzinu zgloba,<br />
a povećava moment (konstantna snaga P=MΩ)<br />
• Iz dinamičkog modela znamo dinamička obilježja zgloba<br />
robota � promjenljivi moment inercije J i koeficijent<br />
viskoznog trenja B, prisutno je trenje i utjecaj sile teže<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
<strong>Pogoni</strong> u <strong>robotici</strong><br />
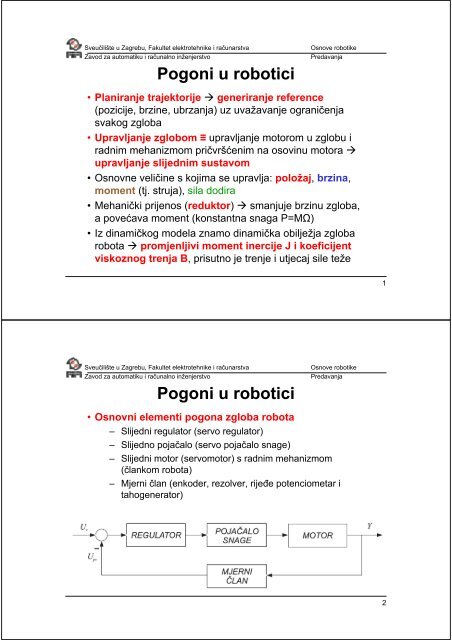
• Osnovni elementi pogona zgloba robota<br />
– Slijedni regulator (servo regulator)<br />
– Slijedno pojačalo (servo pojačalo snage)<br />
– Slijedni motor (servomotor) s radnim mehanizmom<br />
(člankom robota)<br />
– Mjerni član (enkoder, rezolver, rijeđe potenciometar i<br />
tahogenerator)<br />
1<br />
2
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Vrste pogona u <strong>robotici</strong><br />
• Pneumatski pogoni<br />
– Jeftini, najčešće se ugrađuju u translacijski zglob<br />
– Koriste se u uvjetima gdje može doći do eksplozije<br />
– Loša strana što zahtijevaju stalno održavanje i što pod<br />
djelovanjem tereta ne drže položaj (razlog je u stlačivosti<br />
zraka), razmjerno male snage<br />
• Hidraulički pogoni<br />
– Skuplji, najčešće se ugrađuju u translacijski zglob<br />
– Velike snage (manipulacija s težim predmetima) i dosta su<br />
brzi (brzina vrha alata oko 1m/s)<br />
– Loša strana je potreba za stalnim održavanjem i problemi<br />
s brtvljenjem (curenjem ulja), javlja se i buka<br />
• Električki pogoni<br />
– Dominantno u uporabi, odlične upravljačke karakteristike<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Električki pogoni u <strong>robotici</strong><br />
• Istosmjerni motori s permanentnim magnetima<br />
– Pogodni su za upravljanje<br />
– Snage su reda veličine 100 W do 10 kW<br />
– Nominalna brzina vrtnje motora iznosi 1000 – 3000 min−1 ,<br />
– Nedostatak je u kolektoru, koji određuje vijek trajanja i<br />
maksimalnu struju armature u prijelaznom procesu (2<br />
– 2.5 puta veća od nominalne vrijednosti)<br />
– Nominalno (maksimalno) ubrzanje motora i radnog<br />
mehanizma određeno je omjerom nominalnog<br />
(maksimalnog) momenta motora i momenta inercije<br />
motora i radnog mehanizma<br />
– Elektromehanička vremenska konstanta istosmjernih<br />
motora standardne izvedbe reda je veličine 15 – 150 ms,<br />
a nominalno ubrzanje iznosi (1 – 1.5)103 rad/s2 3<br />
4
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Električki pogoni u <strong>robotici</strong><br />
• Istosmjerni motori specijalne izvedbe<br />
– imaju mnogo veće ubrzanje od strojeva standardne izvedbe,<br />
– smanjenje djelovanja kolektora (izvedbe s glatkim, tj. nenazubljenim<br />
rotorom) - poboljšava se hlađenje vodiča armature i smanjuje se<br />
induktivitet armature � poboljšana komutacijska svojstva - prijelazno<br />
strujno preopterećenje motora 8–10 puta veće od nominalnog<br />
• Dodatno povećanje brzine odziva motora s glatkim rotorom postiže<br />
se izvedbom izduženog rotora manjeg promjera � na taj se<br />
način postiže da motori s glatkim rotorom imaju za red veličine<br />
veće ubrzanje od motora standardne izvedbe.<br />
– smanjenje momenta inercije rotora - rotor kao šuplji cilindar ili disk od<br />
nemagnetskog materijala (namot armature obično štampan ili štancan),<br />
– zamjena kolektora (mehaničkog komutatora) elektroničkim<br />
komutatorom (elektronički komutirani, odnosno beskolektorski motori)<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Električki pogoni u <strong>robotici</strong><br />
• Sinkroni motori s permanentnim magnetima<br />
– Beskontaktni, odnosno elektronički komutirani istosmjerni motori �<br />
motor je bez kolektora, ima elektronički komutator i davač položaja<br />
rotora, koji generira signale za upravljanje elektroničkim komutatorom<br />
– ovisno o rasporedu namota armature statora, motori mogu imati<br />
trapezni (BLDC) ili sinusni (PMSM) oblik protuelektromotorne sile<br />
• Asinkroni motori<br />
– Imaju manje dimenzije i težinu, jeftiniji su od istosmjernih strojeva iste<br />
snage i jednostavniji za održavanje,<br />
– Upravljanje asinkronim motorima je složenije, pa su asinkroni pogoni<br />
nešto skuplji od istosmjernih pogona,<br />
– Metode upravljanja – vektorsko, neposredno upravljanje momentom.<br />
• Koračni motori<br />
– pogodni za neposredno digitalno upravljanje – velika brzina odziva i<br />
točnost pozicioniranja � moguć rad u otvorenoj i zatvorenoj petlji<br />
5<br />
6
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Istosmjerni motori za primjenu u<br />
slijednim sustavima robota<br />
Matematički model za istosmjerni motor:<br />
U općem slučaju vrijedi za bilo koji zglob:<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Istosmjerni motori za primjenu u<br />
slijednim sustavima robota<br />
M t<br />
7<br />
8
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Istosmjerni motori za primjenu u<br />
slijednim sustavima robota<br />
Može se zanemariti<br />
Aperiodski odziv brzine vrtnje<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Istosmjerni motori za primjenu u<br />
slijednim sustavima robota<br />
Kombinacijom i preuređenjem prijenosnih funkcija na način da na jednu stranu dođu nezavisne<br />
varijable U a i M s , dobije se:<br />
Drugi član na lijevoj strani može se preurediti množeći brojnik i nazivnik s I a (K a =1/R a ):<br />
• Omjer viskoznog trenja BΩ prema razvijenom momentu KI a nije nikad veći od 0.1<br />
• Pad napona na otporu armature I a R a znatno je manji po iznosu od susjednog člana KΩ (tj.<br />
protuelektromotorne sile E) � zato je taj član za dodatni red veličine manji u odnosu na E,<br />
pa se može zanemariti u analizi dinamičkog ponašanja.<br />
• Ako se zanemareni član i uzme u obzir, rezultati analize dinamičkog ponašanja neće se<br />
bitno promijeniti, jer se u matematičkom smislu jedino vrijednost koeficijenta K malo<br />
povećava.<br />
9<br />
10
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Istosmjerni motori za primjenu u<br />
slijednim sustavima robota<br />
Ovo je najčešći oblik prijenosne funkcije istosmjernog servomotora u robotičkoj literaturi<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Elektronički komutirani istosmjerni<br />
motori u slijednim sustavima robota<br />
• U osnovnoj izvedbi ovaj motor proizvodi sinusoidalnu<br />
protuelektromotornu silu i zbog toga zahtijeva<br />
sinusoidalne struje statora da bi proizveo konstantan<br />
moment motora.<br />
• Rotirajući magnetski tok u zračnom rasporu<br />
sinkronog motora s permanentnim magnetima<br />
predstavlja osnovnu razliku u odnosu na stacionarni<br />
magnetski tok istosmjernog motora.<br />
• Permanentni magnet na rotoru osigurava konstantnu<br />
uzbudu, dok se u pogledu ostalog ovaj motor ne<br />
razlikuje od klasičnog sinkronog motora.<br />
• Transformacijom jednadžbi sinkronog stroja iz RST<br />
koordinatnog sustava u d, q koordinate sustava čvrsto<br />
vezanog za položaj rotora, sve impedancije sinusno<br />
ovisne o zakretu poprimaju oblik konstanti � najčešći<br />
oblik upravljanja – vektorsko upravljanje.<br />
q<br />
d<br />
11<br />
Vektor magnetskog toka Ψ m smješten<br />
je na d-osi, tj. u smjeru osi rotora.<br />
Komponenta struje statora i q koja<br />
razvija moment motora okomita je na<br />
tok Ψ m i položena je u smjeru q-osi.<br />
12
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Elektronički komutirani istosmjerni<br />
motori u slijednim sustavima robota<br />
• Cilj vektorskog upravljanja je održavanje komponente statorske struje i d što bliže nuli,<br />
kako bi bio ispunjen uvjet za struju statora |i s | = i q .<br />
• Za vektorski upravljan elektronički komutirani motor poželjno je odrediti matematički<br />
model u d, q prostoru, a polaznu osnovu za to predstavlja klasični model sinkronog motora.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Elektronički komutirani istosmjerni<br />
motori u slijednim sustavima robota<br />
• Prevođenje iz RST u d,q prostor pomoću Parkove transformacije:<br />
• Ako se statorske naponske jednadžbe izraze u d, q sustavu, koji je čvrsto vezan za položaj<br />
rotora, tada one poprimaju oblik:<br />
13<br />
približno ispunjeno zahvaljujući vektorskom upravljanju<br />
Uz uvjet da je i d =0,<br />
14
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Elektronički komutirani istosmjerni<br />
motori u slijednim sustavima robota<br />
Uz uvjet da je i d =0,<br />
Primjenom Laplaceove transformacije:<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Prijenos pomoću reduktora<br />
Omjer mehaničkog prijenosa i mp definiran je kao omjer mehaničke brzine vrtnje<br />
motora ω m i brzine zgloba ω i :<br />
znatno smanjena ovisnost elektromehaničke vremenske konstante o položaju robota,<br />
15<br />
16
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Načini upravljanja slijednim sustavima<br />
robotskih mehanizama<br />
Mogući oblik digitalnog sustava upravljanja robotskim mehanizmom:<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Načini upravljanja slijednim sustavima<br />
robotskih mehanizama<br />
• Dominiraju kaskadni sustavi upravljanja<br />
• Dva osnovna pristupa:<br />
• Prvi se pristup sastoji u upravljanju varijablama zgloba pomoću podređene<br />
regulacijske petlje struje, odnosno momenta robotske ruke, pa se moment<br />
motora M m u tom slučaju uzima kao ulazna veličina u zglob.<br />
• U ovakvoj se strukturi čitava regulacijska petlja struje može predstaviti kao<br />
ekvivalentnim strujnim pojačalom, koje kao izlaz daje armaturnu struju.<br />
17<br />
18
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Načini upravljanja slijednim sustavima<br />
robotskih mehanizama<br />
• Dominiraju kaskadni sustavi upravljanja<br />
• Dva osnovna pristupa:<br />
• Drugi se pristup sastoji u upravljanju varijablama zgloba pomoću podređene<br />
regulacijske petlje brzine vrtnje pa se robotski zglob uzima kao uzrok<br />
promjene momenta tereta koji djeluje na osovinu motora<br />
• U ovakvoj se strukturi cijela petlja brzine vrtnje može predstaviti<br />
ekvivalentnim naponskim pojačalom, koje kao izlaz daje promjenljivi napon<br />
armature motora.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Načini upravljanja slijednim sustavima<br />
robotskih mehanizama<br />
• Prvi se pristup koristi kada izvršni dio ruke može doći u kontakt s drugim<br />
objektima koji sprečavaju gibanje duž koordinate, jer tada je podesno<br />
regulirati moment<br />
• Drugi se pristup koristi kada se robotska ruka može slobodno gibati duž<br />
neke koordinate (npr. roboti za bojenje), jer tada je prikladno regulirati brzinu<br />
gibanja.<br />
• Treba primijetiti da je moguće regulirati ili brzinu ili moment, ali ne i oboje<br />
zajedno.<br />
• Pri podređenom upravljanju brzinom vrtnje, izlaz iz mikroprocesorskog<br />
regulatora položaja proporcionalan je zadanoj brzini vrtnje, a u slučaju<br />
podređenog upravljanja momentom, zadanom momentu.<br />
• Tijekom analize dinamičkog ponašanja digitalnih slijednih sustava robotskih<br />
mehanizama koja slijedi efekti diskretizacije su zanemareni, jer se smatra da<br />
je frekvencija diskretizacije znatno manja od presječne frekvencije amplitudno<br />
frekvencijske karakteristike otvorenog kruga razmatranih sustava.<br />
19<br />
20
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Primjeri iz prakse: Projektiranje surlastog robota<br />
Zahtjevi:<br />
• male dimenzije elemenata<br />
• veliki moment izlazne osovine<br />
• visoka preciznost pozicioniranja<br />
• mogućnosti lakog programiranja<br />
• standardni tip brze komunikacije<br />
(npr. CAN sabirnica)<br />
Karakteristike robota:<br />
• sastavljen od osnovnih robotskih modula s 2 SSG<br />
• mogućnost naknadnog dodavanja modula (npr. do 12 SSG)<br />
• opremanje robota s dodatnim senzorima (sonar, kamera, ispitne<br />
sonde) ili alatom (laserski nož, hvataljka)<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odabrano rješenje nakon pretrage<br />
na Internetu<br />
21<br />
22
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljački uređaj Faulhaber MCDC 3003/06 C<br />
Karakteristike: Kaskada P regulatora pozicije, PI regulatora brzine<br />
vrtnje i PWM regulatora struje armature<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
(Robot Kiwi)<br />
Karakteristike: Kaskada<br />
vanjskog regulatora pozicije, PI<br />
regulatora brzine vrtnje i PWM<br />
regulatora struje armature uz<br />
moguće konfiguriranje kaskade<br />
(pomoću DIP1 preklopke)<br />
Maxon 4-Q-DC Servoamplifier ADS<br />
23<br />
24
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Aerotech A3200 Servo controller (robot Hrid)<br />
Karakteristike: Kaskada<br />
PI regulatora pozicije, PI<br />
regulatora brzine vrtnje i<br />
PWM regulatora struje<br />
armature uz moguće<br />
konfiguriranje kaskade te<br />
mogućnosti kompenzacije<br />
i predupravljanja<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Aerotech A3200 Servo controller (robot Hrid)<br />
Potpuno digitalizirani<br />
sustav upravljanja<br />
25<br />
26
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Sinteza nominalnog slijednog regulatora<br />
• Zna se da parametri J u i B ovise o položaju, odnosno brzinama zglobova<br />
robota i da su stoga promjenljivi parametri čije vrijednosti su iz intervala<br />
[J umin , J umax ], odnosno [B min , B max ],<br />
• Za provođenje sinteze slijednog regulatora potrebno je odrediti granice<br />
intervala [J umin , J umax ] i [B min , B max ], te definirati nominalne vrijednosti<br />
parametara J un i B n za svaki robotski zglob � Podloga za određivanje<br />
nominalnih parametara slijednih regulatora pojedinih zglobova robota<br />
• Određivanje parametara � primjena postupaka identifikacije (npr. rekurzivna<br />
metoda najmanjih kvadrata - RLS)<br />
zglob1<br />
zglob2<br />
J umax J un J umin<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Rezultati identifikacije prvog zgloba 4-osnog<br />
SCARA robota Kiwi<br />
manji J, brži odziv - identifikacija u skladu s očekivanjima<br />
27<br />
28
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Metode sinteze slijednih sustava<br />
• Sinteza sustava obuhvaća izbor strukture i parametara<br />
korekcijskih elemenata (regulatora) u svrhu postizanja<br />
zadanih pokazatelja kvalitete upravljanja<br />
• Osnovni elementi sustava (objekt upravljanja, izvršni uređaj,<br />
pojačalo i mjerni elementi) – odabrani prema tehničkim<br />
zahtjevima<br />
• Pretpostavka da su parametri svih osnovnih elemenata<br />
sustava stacionarni<br />
• Odabir linearnog regulatora<br />
– U regulacijskim petljama položaja dominantno se koristi<br />
P i PI regulator<br />
– U regulacijskim petljama brzine vrtnje dominantno se<br />
koristi PI regulator<br />
– U regulacijskim petljama armaturne struje dominantno<br />
se koristi PI regulator, PWM regulator i regulator s<br />
histerezom<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Metode sinteze slijednih sustava<br />
• Podešavanje parametara regulatora – djeluje se na pogrešku<br />
regulacije δ us i nadvišenje σ m. Ako se pri tom ne može<br />
ostvariti potrebna brzina odziva, uvode se unutarnje povratne<br />
veze, tj. primjenjuje se kaskadni sustav regulacije<br />
• U pogledu zahtijevane točnosti, općenito vrijedi δ us ↓ � K o ↑,<br />
ali povećanje K o može uzrokovati nestabilnost<br />
• Zato se postavlja dodatni zahtjev na korekcijski element �<br />
osiguranje amplitudnog i faznog osiguranja<br />
• Za sintezu parametara mogu se primijeniti direktne i<br />
indirektne metode<br />
29<br />
30
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Metode sinteze slijednih sustava<br />
• Direktne metode:<br />
– analitičke metode – pogodne samo za analizu jednostavnijih<br />
sustava automatskog upravljanja, a sasvim nepogodne za<br />
sintezu sustava<br />
– metode simuliranja sustava na računalu – daju neposredan<br />
uvid u dinamičko ponašanje konkretne strukture i parametara<br />
sustava. Može se organizirati iterativni postupak optimiranja<br />
sustava, kojim se uz odabrani kriterij optimiranja dobiju<br />
parametri sustava<br />
• Indirektne metode:<br />
– frekvencijske metode – pokazale su se vrlo pogodnim za<br />
inženjersku primjenu<br />
– metoda mjesta korijena – dosta nepogodna za sintezu<br />
sustava višeg reda<br />
– integralne metode – za jednostavnije sustave gdje se zadani<br />
pokazatelji kvalitete nastoje postići minimiziranjem nekog<br />
integralnog kriterija (IAE, ITAE, ISE, ITSE)<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Frekvencijske metode sinteze PI regulatora<br />
• Tehnički optimum:<br />
– Određivanje integralne vremenske konstante T I – cilj je odrediti<br />
T I koja kompenzira najveću (dominantnu) vremensku<br />
konstantu u regulacijskom krugu<br />
– Određivanje koeficijenta pojačanja K R – cilj je za tako određeni<br />
T I odrediti K R s kojim se ostvaruje zadano fazno osiguranje<br />
• Simetrični optimum:<br />
– Primijenjuje se na astatičke sustave prvog reda – parametri PI<br />
regulatora određuju se tako da Bodeova frekvencijska<br />
karakteristika na presječnoj frekvenciji ω c ima nagib -1 te da<br />
su frekvencije loma lijevo i desno od ω c jednako udaljene<br />
(simetrične) od ω c � širina pojasa određuje fazno osiguranje<br />
– Izbor ω I = 1/T I – frekvencija loma lijevo od ω c<br />
– Izbor K R – određuje presječnu frekvenciju ω c<br />
• Pitanje: Mogu li se oba načina sinteze parametara PI regulatora<br />
primijeniti na pozicijske slijedne sustave?<br />
31<br />
32
Lo<br />
Lz<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Frekvencijske metode sinteze PI regulatora<br />
ωc<br />
Presječna<br />
frekvencija<br />
otvorenog<br />
regulacijskog<br />
sustava<br />
ωg<br />
Granična frekvencija<br />
zatvorenog<br />
regulacijskog<br />
sustava ω g =ω p<br />
LAFK<br />
otvoreni krug<br />
LAFK<br />
zavoreni krug<br />
-3 dB<br />
ω<br />
ω<br />
Pitanje: Kakvo je ponašanje pozicijskog slijednog<br />
sustava s PI regulatorom podešenim<br />
prema “tehničkom optimumu”?<br />
Odgovor: Nestabilno!<br />
Osnovno o frekvencijskim metodama sinteze:<br />
• Pogodno je za sintezu koristiti Bodeov prikaz<br />
(aproksimaciju s pravcima) frekvencijskih<br />
karakteristika otvorenog slijednog sustava<br />
• Osim željenog faznog osiguranja, neophodno je<br />
uspostaviti barem približnu vezu između<br />
frekvencijskih karakteristika otvorenog sustava i<br />
pokazatelja kvalitete prijelazne pojave<br />
zatvorenog sustava<br />
• Iz teorije je poznato da nagib i nivo logaritamske<br />
amplitudno-frekvencijske karakteristike na niskim<br />
frekvencijama određuje pogrešku u stacionarnom<br />
stanju, dok oblik te karakteristike na srednjim<br />
frekvencijama određuje dinamičko ponašanje<br />
sustava<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Frekvencijske metode sinteze - inženjerski pristup<br />
tipični slijedni sustav – primijetiti da je astatički (nagib -1 na<br />
niskim frekvencijama)<br />
• Nomogrami za tipične slijedne sustave - mogu se odrediti pokazatelji<br />
odziva na skokovitu promjenu reference (h m , ω c t m , ω c t p , ω p /ω c � A m , ω m )<br />
• Vrlo često je ispunjeno 1≤ ω 3 /ω c ≤ 4 � normirano vrijeme maksimuma<br />
ω c t m ≈ 3 i malo se mijenja s L 1 i ω 3 � t m ≈ 3/ω c (može poslužiti za<br />
procjenu presječne frekvencije sustava iz vremena maksimuma).<br />
• Iz nomograma slijedi da je ω p (ω g ) ≈ ω c (vidi prethodnu sliku)<br />
33<br />
34
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Frekvencijske metode sinteze – opće preporuke<br />
• Karakteristike nekorigiranog sustava L o (ω) i karakteristika korigiranog sustava L ok (ω)<br />
trebaju se podudarati u što je moguće većem rasponu frekvencija. U suprotnom,<br />
realizacija korekcijskog elementa postaje složena.<br />
• U području niskih frekvencija nagib karakteristika treba iznositi -r·20dB/dek<br />
ω=1 � L o (ω) = 20 log K o , iznos za r ovisi o zahtjevima na δ us , δ uk i δ ud<br />
• Nagib karakteristike na frekvenciji presjeka ω c poželjno je da iznosi -20dB/dek<br />
(postiže se potrebno fazno osiguranje). Širina pojasa s tim nagibom treba iznositi 2-4<br />
oktave (pokriva nadvišenja u području σ m = 0 – 30 %)<br />
Određivanje parametara serijskih korekcijskih elemenata:<br />
Lok ( ω) = Lo( ω) + Lk(<br />
ω)<br />
ϕ ( ω) = ϕ ( ω) + ϕ ( ω)<br />
ok o k<br />
• Karakteristika korekcijskog elementa:<br />
Lok ( ω) = Lok ( ω) −Lo(<br />
ω)<br />
ϕ ( ω) = ϕ ( ω) −ϕ<br />
( ω)<br />
k ok o<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Zadovoljavajuća korekcija često nije moguća samo promjenom pojačanja:<br />
• K o ↑ dva puta � pomak LAFK za 6 dB � promjena ω c � promjena F.O. i A.O. (tj. desi se<br />
određena promjena pokazatelja kvalitete)<br />
• U nekim slučajevima zadana kvaliteta postiže se serijskim korekcijskim elementom oblika<br />
(lead-lag kompenzator, skraćeno L-L)<br />
1+<br />
τ Ts 1+<br />
T1ks Gs () = Kk = Kk<br />
1+ Ts 1+<br />
T s<br />
2k<br />
odnosno,<br />
G( s)<br />
= KC<br />
( s − z0<br />
)<br />
( s − p )<br />
gdje je: p0 = 1/T, z0 = 1/τT, and KC = Kkτ. Određivanje parametara L-L korekcijskog elementa:<br />
• Kk se određuje iz zahtjeva na pogrešku u stacionarnom stanju<br />
• Ako treba smanjiti σm i tm , onda treba povećati F.O. (γ) i ωc � τ > 1, odnosno T1k >T2k , tj.<br />
kompenzator treba imati pozitivnu fazno-frekvencijsku karakteristiku (postaje element s<br />
faznim prethođenjem)<br />
• Pretpostavka: Kk = 1, T1k = 1 (ϕm – maksimalna vrijednost koju dostiže ϕk (ω))<br />
τ = T 1k /T 2k<br />
ϕ m [ o ]<br />
10<br />
55<br />
• Približna procjena djelovanja DT 1 i PT 1 elemenata na fazu: ±45 o /dek, ±15 o /okt<br />
5<br />
42<br />
2<br />
19<br />
0<br />
35<br />
36
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• U slučaju kad je τ > 1, iznos nule zo je manji od iznosa pola po . Zato L-L kompenzator<br />
pomiče krivulju mjesta korijena prema lijevoj poluravnini. To rezultira povećanim F.O. i<br />
bržim odzivom sustava.<br />
• U frekvencijskom području kompenzator dodaje pozitivnu fazu na području frekvencija<br />
1/τT do 1/T, odnosno 1/T1k do 1/T2k . Iz tablice je vidljivo da ovisno o parametru τ,<br />
maksimum dodane faze je u pravilu manji od 90o . Za veće vrijednosti potrebno je koristiti<br />
dva ili više kompenzatora.<br />
• Maksimalni iznos faze dodan je na središnjoj frekvenciji:<br />
1<br />
ω n =<br />
T τ<br />
• Maksimalni Iznos dodane faze može se izračunati iz vrijednosti parametra τ<br />
τ −1<br />
sin<br />
φ =<br />
τ + 1<br />
• Dodani pozitivni iznos faze povećava F.O. i tako povećava stabilnost sustava. L-L<br />
kompenzator s faznim prethođenjem projektira se određivanjem τ iz potrebnog iznosa<br />
faze da se zadovolje zahtjevi na F.O, te određivanjem T, odnosno T 2k , tako da se<br />
potrebna promjena faze doda na mjestu nove presječne frekvencije – može se koristiti<br />
prethodno spomenuta procjena ±45 o /dek, ±15 o /okt<br />
• Nedostatak korekcije uz τ > 1 je povećanje pojačanja na visokim frekvencijama (dakle,<br />
šuma i smetnji – pri skokovitoj promjeni ulazne veličine pojačanje za ω>> iznosi τ·K k (dok<br />
je K k za ω=0)<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Ako je kvaliteta prijelazne pojave zadovoljavajuća (σ m , t m ), a potrebno je povećati<br />
točnost u stacionarnom stanju, onda se koristi L-L kompenzator s faznim zaostajanjem<br />
� τ < 1, odnosno T 2k >T 1k . S obzirom da je iznos nule z o veći od iznosa pola p o ,L-L<br />
kompenzator pomiče krivulju mjesta korijena udesno bliže ishodištu fazne ranine, što<br />
nije poželjno. Zato u pravilu z o i p o moraju biti smješteni tako da bi što manje mijenjali<br />
dinamiku sustava, a da bi se poboljšao odziv u stacionarnom stanju.<br />
• Na visokim frekvencijama L-L kompenzator s faznim zaostajanjem ima jedinično<br />
pojačanje, a na niskim frekvencijama pojačanje je iznosa z 0 /p 0 > 1, pa je time za toliko<br />
manja i pogreška u stacionarnom stanju.<br />
• Pretpostavka: K k = 1, T 1k = 1 (ϕ m – maksimalna vrijednost koju dostiže ϕ k (ω))<br />
τ = T 1k /T 2k<br />
ϕ m [ o ]<br />
ok<br />
o<br />
1<br />
0.1<br />
-55<br />
2k 1k<br />
c<br />
0.2<br />
-42<br />
3<br />
0.5<br />
-19<br />
37<br />
38
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
•<br />
•<br />
•<br />
Primjena L-L na astatičke sustave – da se smanji kinetička pogreška δuk �Kok > Ko σm nepromijenjeno � γ nepromijenjeno<br />
tm nepromijenjeno � ωc nepromijenjeno<br />
1<br />
ω 1k<br />
=<br />
T1k<br />
ωc<br />
≤<br />
10<br />
osigurava se da L-L ne djeluje na F.O.<br />
• Ako je r=0, a postoji uvjet δus = 0, tada korekcijski element mora sadržavati integralno<br />
ponašanje:<br />
⎛ 1 ⎞ ⎛ 1 ⎞ 1+<br />
Ts I<br />
GR() s = Gk() s = Kk ⎜1+ ⎟= KR⎜1+ ⎟=<br />
KR<br />
⎝ Ts k ⎠ ⎝ Ts I ⎠ Ts I<br />
• Proporcionalna komponenta dodaje se zato da se isključi integralno djelovanje u<br />
području srednjih frekvencija (oko ω c ).<br />
• PI djelovanjem se uz isto γ, postiže veći ω c nego samo I djelovanjem � brži odziv uz<br />
isto nadvišenje (manji t m )<br />
• Određivanje integralne vremenske konstante:<br />
– Statički (brzinski) slijedni sustavi r=0 � T I = T max � tehnički optimum<br />
– Astatički (pozicijski) r=1 � AFK simetrična oko ω c � simetrični optimum<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Povezivanje frekvencijske i vremenske domene<br />
• Ocjena pokazatelja kvalitete slijednih sustava, koji su u pravilu sustavi višeg reda,<br />
može se približno izvršiti na temelju ocjene pokazatelja kvalitete referentnog<br />
sustava drugog reda – ideja je uspostaviti vezu između nadvišenja σ m u odzivu<br />
zatvorenog kruga i faznog osiguranja γ kod frekv. karakteristika otvorenog kruga<br />
• Za referentni sustav drugog reda vrijede sljedeće relacije:<br />
– za Bodeov prikaz aproksimiran pravcima:<br />
[ ]<br />
o<br />
σm% + γ ⎡<br />
⎣<br />
⎤<br />
⎦ ≈63<br />
– za točan Bodeov prikaz:<br />
o<br />
σm[ % ] + γ ⎡<br />
⎣<br />
⎤<br />
⎦<br />
≈70<br />
• Ove relacije mogu se koristiti za procjenu nadvišenja sustava drugog i višeg reda,<br />
odnosno za procjenu potrebnog faznog osiguranja, da bi odziv sustava imao<br />
zadano nadvišenje<br />
• Relacije za t m i σ m mogu se koristiti u postupku sinteze za određivanje<br />
frekvencijske karakteristike otvorenog sustava u području srednjih frekvencija<br />
prema pokazateljima kvalitete prijelazne pojave<br />
39<br />
40
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Komentari na tehnički i simetrični optimum<br />
Zadane pokazatelje kvalitete želi se postići sintezom parametara PI regulatora K R i T I<br />
– slučaj upravljanja brzinom vrtnje, strujom armature – upravljanje<br />
statičkim sustavom koji ne sadrži niti jedan element s integralnim<br />
djelovanjem � otvoreni krug ima konačno pojačanje L(0) na niskim<br />
frekvencijama (nagib 0). Dodavanjem PI regulatora se želi to<br />
promijeniti (dodaje se integralno djelovanje i dodatna nula u otvoreni<br />
krug.<br />
– slučaj upravljanja položajem, silom dodira – upravljanje astatičkim<br />
sustavom koji sadrži jedan element s integralnim djelovanjem �<br />
otvoreni krug ima beskonačno pojačanje L(0) na niskim frekvencijama<br />
(nagib -1). Dodavanjem PI regulatora dodaje se još jedno integralno<br />
djelovanje i dodatna nula u otvoreni krug.<br />
U slučaju tehničkog optimuma kada je T I = T k =T max =T 1 , prijenosne funkcije<br />
nekorigiranog i korigiranog sustava 2. reda imaju oblik:<br />
K<br />
o<br />
ok<br />
G o(<br />
s)<br />
=<br />
Gok<br />
( s)<br />
= Gk<br />
( s)<br />
⋅Go<br />
( s)<br />
=<br />
Kok<br />
=<br />
( 1+<br />
T1s)(<br />
1+<br />
T2s)<br />
s(<br />
1+<br />
T2s)<br />
Iako samo po sebi vidljivo, vrijedi istaknuti da je regulirani slijedni sustav statički<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Bodeov prikaz:<br />
20 log KR/TI<br />
20 log Ko<br />
20 log KR/TI<br />
L(ω)<br />
Lo<br />
ω=1<br />
Lk(ω)<br />
ω=1<br />
Lok<br />
-1<br />
ω1=1/T1<br />
ωI=1/TI<br />
-1<br />
ωc<br />
ωck<br />
20 log KR<br />
K<br />
ωck > ωc<br />
ω2=1/T2<br />
-2<br />
ω<br />
K RK<br />
T<br />
ω<br />
I<br />
o<br />
41<br />
42
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Ako je ω ck = ω 2 /2 � γ ≈ 60 o , pa nadvišenje iznosi σ m ≈ 64 - γ = 4%<br />
• Za sustav 2.reda � ξ = 0.707 (σ m = 4,3%) � Takav način projektiranja regulatora se<br />
u klasičnoj literaturi naziva projektiranje prema tehničkom optimumu<br />
• Tehnički optimum u proširenom smislu – pojačanje regulatora u skladu sa zadanim<br />
σ m , odnosno γ (relacija γ ≈ 63 – σ m )<br />
• Postiže se presječna frekvencija ω ct (t mt ≈ 3.3/ω ct )<br />
• Realni slijedni sustav n ≥3:<br />
• Projektiranje prema tehničkom optimumu:<br />
Ko<br />
Go() s =<br />
(1 + Ts 1 )(1 + Ts 2 )(1 + Ts 3 )<br />
G () s = G () s G () s =<br />
K<br />
K<br />
K K<br />
=<br />
ok R o<br />
ok k o<br />
s(1 + Ts 2 )(1 + Ts 3 )<br />
ok<br />
TI<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Bodeov prikaz:<br />
20 log KR/TI<br />
20 log Ko<br />
20 log KR/TI<br />
L(ω)<br />
Lo<br />
ω=1<br />
Lk(ω)<br />
ω=1<br />
Lok<br />
-1<br />
ω1=1/T1<br />
ωI=1/TI<br />
-1<br />
ωc<br />
ωck<br />
ωck > ωc<br />
20 log KR<br />
ω2<br />
-2<br />
ω3<br />
-3<br />
ω<br />
ω<br />
43<br />
44
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Za sustave višeg reda (n ≥3) � određivanje koeficijenta pojačanja regulatora<br />
(korekcijskog elementa) prema približnoj relaciji za određivanje γ iz zadanog<br />
nadvišenja σ m :<br />
γ[ o ] ≈ 58 - σ m<br />
• Također približna relacija za određivanje vremena maksimuma:<br />
t mt ≈ 2.9/ω ct<br />
• Sažetak: Projektiranje PI regulatora prema tehničkom optimumu može se<br />
primijeniti samo na statičke objekte upravljanja, jer astatičke sustave čini a priori<br />
nestabilnima (zbog dva integratora u otvorenom krugu faza na niskim<br />
frekvencijama kreće od -180 o )<br />
Kako stoje stvari s određivanjem K R i T I prema simetričnom optimumu, kada se želi<br />
dobiti simetričnu LAFK oko ω c ?<br />
• Klasična definicija kaže da se ovaj optimum primjenjuje na astatički sustav prvog<br />
reda, tj. za r=1. Zašto za r=1? Zato, jer tehnički optimum nije primjenjiv, pa treba<br />
primijeniti neki drugi kriterij.<br />
• Zašto ne za r=2,3,..? Jasno, zbog problema nestabilnosti.<br />
• Za r=1 u otvorenom krugu su dva integratora pa treba izborom parametara K R i<br />
T I osigurati potrebnu stabilnost sustava, tj. potrebno F.O. na ω c .<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Projektiranje prema simetričnom optimumu za astatički sustav (r=1):<br />
Ko<br />
Go() s =<br />
s(1 + Ts 1 )<br />
Najjednostavniji slučaj – inače se na T1 gleda<br />
kao na dominantnu vremensku konstantu Tmax Kok (1 + Ts I )<br />
Gok () s = Gk() s Go() s = 2<br />
s (1 + Ts) KRKo Kok<br />
=<br />
T<br />
• AFK korigiranog sustava je simetrična, ako su ω I =1/T I i ω 1 =1/T 1 jednako udaljene od<br />
ω c :<br />
ω ω<br />
=<br />
ω ω<br />
I cs =<br />
cs<br />
I<br />
• Širina područja nagiba (-1) iznosi:<br />
• Faza na frekvenciji ω cs iznosi:<br />
a<br />
ω T ω ω<br />
ω ω ω<br />
1 I 1 cs<br />
= = ⋅ =<br />
I T1<br />
cs I<br />
a<br />
2<br />
1<br />
o o<br />
1<br />
ϕ( ωcs ) =− 180 + arctgTIωcs− arctgT1ωcs =− 180 + arctga−arctg a<br />
I<br />
45<br />
46
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Bodeov prikaz:<br />
20 log KR/TI<br />
20 log Ko<br />
20 log KR/TI<br />
L(ω)<br />
Lo<br />
ω=1<br />
Lk(ω)<br />
ω=1<br />
Lok<br />
-1<br />
-2<br />
-1<br />
ωc<br />
ωI=1/TI<br />
ωI=1/TI<br />
ωcs > ωc<br />
ωcs<br />
ω1=1/T1<br />
20 log KR<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
1<br />
a -<br />
o<br />
180 ( ) arctg arctg arctg a −<br />
γ = + ϕ ωcs<br />
= a − = = arctg<br />
a 1<br />
1+<br />
a ⋅<br />
2a<br />
a<br />
• Fazno osiguranje iznosi:<br />
1+ sinγ<br />
a =<br />
cosγ<br />
• Približne vrijednosti γ i σ m u odnosu na razne vrijednosti koeficijenta a:<br />
a<br />
γ [ o ]<br />
σ m [%]<br />
• Približne relacije za γ i σ m (vrijede za a > 1):<br />
γ<br />
γ ≈15 a, odnosno a≈<br />
15<br />
64 −σ<br />
m<br />
σm≈64 −γ ≈64 −15 a, odnosno a≈<br />
15<br />
2<br />
30<br />
34<br />
-2<br />
2<br />
1 a 1<br />
3<br />
45<br />
19<br />
4<br />
60<br />
4<br />
ω<br />
ω<br />
47<br />
48
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
σ m [%]<br />
γ [ o ]<br />
a<br />
a 2<br />
10<br />
54<br />
3.6<br />
12.96<br />
U pravilu se kod sinteze PI regulatora prema simetričnom optimumu projektira<br />
sustav za nadvišenje veće od zadanog (σm > σmz ), npr. σm = k σmz , gdje je k=2, 3, 4,<br />
5, pri čemu vrijedi ograničenje σm ≤ 60%. Zadano nadvišenje ostvaruje se<br />
dodavanjem filtra na ulaz referentnog signala:<br />
1<br />
Gf() s =<br />
1+<br />
Ts<br />
f<br />
20<br />
44<br />
2.93<br />
8.6<br />
30<br />
34<br />
2.26<br />
5.14<br />
Primjer: Neka je sustav projektiran za nadvišenje σ mω =30%. Za taj slučaj vrijede<br />
odnosi prikazani u tablici:<br />
σ mz [%]<br />
σ m /σ mz<br />
T f<br />
30<br />
1<br />
0<br />
20<br />
2/3<br />
t m /4<br />
10<br />
1/3<br />
t m /2<br />
5<br />
1/6<br />
2t m /3<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Pseudoderivativni regulator s predupravljanjem (PDFF)<br />
• PDFF regulator može zamijeniti standardne PI regulatore u slučajevima kad su<br />
parametri PI regulatora dobro podešeni u odnosu na smetnju, ali zahtijevaju dodatno<br />
nezavisno podešenje u odnosu na referencu.<br />
• Struktura PDFF regulatora s nazivima ulaza i izlaza sukladnim nazivima blokova za<br />
PLC:<br />
PV ( s)<br />
⎛ KP ⎞<br />
OUT ( s)<br />
= = P ⋅ KP ⋅ SP(<br />
s)<br />
− KP ⋅ PV ( s)<br />
+ ( SP PV )<br />
G ( s)<br />
⎜<br />
TI s ⎟ −<br />
p<br />
⎝ ⎠<br />
SP P⋅ KP<br />
OvisnooparametruP, struktura<br />
regulatora se mijenja i ima različit<br />
utjecaj na dinamičko ponašanje<br />
SP-PV<br />
KP<br />
TI s<br />
+<br />
+<br />
-<br />
OUT<br />
slijednog sustava<br />
Za P=1 � PI regulator<br />
PV KP<br />
⎛ K ⎞ R<br />
Go() s ⎜P⋅ KR<br />
+ ⎟<br />
PV () s<br />
TIs Gz() s = =<br />
⎝ ⎠<br />
SP() s ⎛ K ⎞ R<br />
1 + Go( s) ⎜KR + ⎟<br />
⎝ TIs⎠ 49<br />
50
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Treba primijetiti da podesivi parametar P ne utječe na polove zatvorenog sustava, ali<br />
zato utječe na nulu:<br />
⎛PTs ⋅ I + 1⎞<br />
KR⋅Go() s ⎜ ⎟<br />
PV () s<br />
TIs Gz() s = =<br />
⎝ ⎠<br />
SP() s ⎛Ts I + 1⎞<br />
1 + KR⋅Go( s)<br />
⎜ ⎟<br />
⎝ TIs ⎠<br />
Budući da parametar P utječe na slijedni sustav putem predupravljanja, on ne utječe<br />
na prijenosnu funkciju zatvorenog kruga s obzirom na smetnju. S druge strane,<br />
njegov utjecaj na nulu zatvorenog kruga neposredno utječe na dinamiku zatvorenog<br />
kruga u odnosu na referencu. To znači da PDFF regulator omogućava nezavisno<br />
podešavanje dinamike odziva slijednog sustava na promjenu reference.<br />
Kod praktične realizacije, isto kao kod PI regulatora, treba izvršiti provjeru izlaza u<br />
odnosu na postavljena ograničenja, te u slučaju ulaska i zadržavanja izlaza<br />
regulatora u limitu, potrebno je zaustaviti integriranje (anti-windup).<br />
Preporuka: Odrediti K R i T I kao za standardni PI regulator koristeći simetrični (za<br />
astatičke procese) ili tehnički optimum (za statičke procese), zatim mijenjati P dok se<br />
ne dobiju zadovoljavajući odzivi.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Primjer: PDFF regulacija brzine vrtnje istosmjernog motora (Matlab+Simulink)<br />
regulator<br />
+ pojačalo<br />
snage<br />
Parametri određeni prema tehničkom optimumu: K R =5.8, T I =0.37 s<br />
Simulacijski eksperimenti: P=0; 0,25; 0.5; 0,75; 1.<br />
Promjena reference: ΔU r =0.65 V (ΔΩ=10 s -1 )<br />
Promjena poremećajne veličine (momenta tereta): ΔM t =1 Nm<br />
51<br />
52
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Promjena reference<br />
Promjena tereta<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Sustavi upravljanja zglobom robota uz<br />
upravljanje momentom<br />
• Kaskadna struktura s vanjskom petljom po položaju i unutarnjom petljom po<br />
struji (momentu)<br />
• Osnovni cilj upravljanja kretanjem robotske ruke predstavlja ostvarivanje<br />
potrebnog momenta u svakom zglobu da se pokrene manipulirani teret i da<br />
se pri tom svladaju svi momenti trenja, sile teže i dinamički momenti uslijed<br />
inercije, koji se suprotstavljaju gibanju.<br />
• Osnovna shema upravljanja sadrži P ili PD regulator položaja (vidi sliku)<br />
• PD regulator položaja se u praksi realizira kao paralelni rad P i D regulatora<br />
položaja, odnosno P regulatora položaja i P regulatora brzine<br />
strujna petlja<br />
53<br />
zanemareno je viskozno trenje<br />
54
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Analiza statičkog i dinamičkog ponašanja<br />
• prijenosna funkcija zatvorene regulacijske petlje ima oblik:<br />
• gdje je:<br />
• Iz karakteristične jednadžbe<br />
• slijedi da je<br />
Koeficijent prigušenja ovisi o<br />
ukupnom momentu inercije J u , koji<br />
se mijenja s promjenom položaja<br />
robotske ruke kao i radnog tereta.<br />
Za dobro projektirani manipulator,<br />
J u se mijenja u odnosu 10 : 1.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Analiza statičkog i dinamičkog ponašanja<br />
• Zbog promjenljivog J u postoji problem određivanja parametara<br />
nominalnog regulatora (vezanih uz nominalnu vrijednost J un )<br />
• Obično se odabire da je J un = J sr<br />
• U literaturi se mogu pronaći preporuke da se za J u = J sr regulacijska<br />
petlja podesi na kritičnu vrijednost, tj. ξ =1.<br />
• Tada vrijedi:<br />
• Budući da je ξ sr = 1, koeficijent prigušenja za najmanji moment inercije<br />
(J sr /3) je ξ = 1.73, a za najveći (3J sr ) je ξ = 0.58.<br />
• Prirodna frekvencija neprigušenih oscilacija za J sr označena je s ω no<br />
• Shodno tome, frekvencija neprigušenih oscilacija iznosi ω n = 1.73 ω no<br />
za najmanji, a ω n = 0.58 ω no za najveći moment inercije.<br />
• Manji moment inercije uzrokuje brži odziv iveći koeficijent prigušenja,<br />
a time i manje nadvišenje u odzivu.<br />
• Treba uočiti da uvijek postoji nadvišenje zbog D djelovanja regulatora<br />
55<br />
56
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odzivi slijednog sustava zgloba s nominalnim regulatorom položaja<br />
uz regulaciju momenta<br />
σ m=6%<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Ovisnost promjene momenta motora o promjenama referentne<br />
vrijednosti položaja i momenta tereta može se izraziti sljedećom<br />
prijenosnom funkcijom:<br />
• Poremećajni moment M s sadrži dinamičke i statičke komponente<br />
� u stacionarnom stanju djeluju samo statičke komponente<br />
(prvenstveno moment sile teže M g), pa vrijedi M m=M g<br />
• Postojanje pogreške položaja u stacionarnom stanju (s=0)<br />
• Opisani nedostaci osnovne regulacijske petlje predstavljaju<br />
zapreku pri primjenama robota koje zahtijevaju preciznost<br />
pozicioniranja i čim bolja svojstva dinamičkog momenta motora.<br />
57<br />
58
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljačka petlja po momentu s<br />
kompenzacijskim proširenjem<br />
• Estimirana vrijednost momenta inercije uvedena je kao programirano pojačanje J ue.<br />
• Ovo pojačanje može se uvesti na način, kao što je prikazano na slici dolje, tj.<br />
neposredno iza PD regulatora, ili pak samo u bloku predupravljanja ubrzanjem (tj.<br />
kao J ues 2 ).<br />
• Estimirana vrijednost statičkog momenta ovisnog o djelovanju sile teže M ge kao<br />
dodatni korekcijski signal na izlazu regulatora.<br />
• Predupravljanje ubrzanjem, dodano sa svrhom da se poboljša točnost u dobivanju<br />
zadanog dinamičkog momenta M d.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljačka petlja po momentu s<br />
kompenzacijskim proširenjem<br />
• Nakon uvođenja navedenih elemenata, jednadžba slijednog regulatora<br />
poprima oblik:<br />
• Jednadžba zatvorenog regulacijskog kruga položaja poprima oblik:<br />
• Iz karakteristične jednadžbe sustava može se odrediti koeficijent<br />
prigušenja i prirodna frekvencija neprigušenih oscilacija:<br />
M d<br />
59<br />
60
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljačka petlja po momentu s<br />
kompenzacijskim proširenjem<br />
• Uz uvjet (prikladan izbor vrijednosti pojačanja<br />
strujne petlje)<br />
• Jednadžba zatvorenog regulacijskog kruga položaja poprima<br />
oblik:<br />
• pogreška položaja u stacionarnom stanju pri jediničnoj<br />
skokovitoj promjeni referentne veličine ima oblik:<br />
• Uz uvjet da je M ge =M g i J ue =J u , slijedi da je razvijeni moment<br />
idealizirani slučaj koji<br />
realno nije ispunjen<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljačka petlja po momentu s<br />
kompenzacijskim proširenjem<br />
• Ako se definira omjer estimirane i stvarne vrijednosti c= J ue/J u, može se promatrati<br />
utjecaj odstupanja njegove realne vrijednosti (c≠1) na odziv položaja zgloba robota<br />
• Karakteristično je da pri skokovitoj promjeni reference Δθ odzivi položaja poprimaju<br />
u početku vrijednost θ(0) = cΔθ (to je tako jer u lineariziranom modelu derivativno<br />
djelovanje nema limita) � kad je stvarna vrijednost manja od estimirane javlja se<br />
nadvišenje koje može biti jako veliko (čak i u realnim uvjetima uz uvažavanje svih<br />
ograničenja u slijednom sustavu)<br />
• Postoji potreba za postupkom podešenja nominalnog slijednog regulatora koji će<br />
riješiti ili ublažiti problem mogućeg nadvišenja u odzivu položaja � predlaže se tzv.<br />
min-max postupak određivanja parametara slijednog regulatora K p i K d<br />
– Uz fiksno J ue � najbolje ponašanje uz J ue =J min (c≤1)<br />
– Minimalni koeficijent prigušenja ξ min dobije se uz J ue =J max<br />
– Ideja je da se postavi ξ min > 1 tako da su sve moguće vrijednosti prigušenja uvijek<br />
veće od 1<br />
– Da bi se ovaj postupak mogao primijeniti treba dobro poznavati (J min , J max )<br />
61<br />
62
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu<br />
• Nedostaci koncepta linearnih metoda upravljanja položajem uz<br />
upravljanje momentom<br />
– zbog ograničenih mogućnosti digitalnih računala nemoguće je<br />
eliminirati utjecaj poremećajne veličine M s (ne mogu se točno i<br />
pravovremeno estimirati sve komponente od M s)<br />
– traže se učinkovitiji algoritmi koji se zasnivaju na drugim načelima<br />
korekcije poremećajne veličine<br />
• Robusno upravljanje<br />
– Eliminacija pogreške nastale u sustavu uslijed djelovanja<br />
poremećajne veličine predstavlja osnovni cilj razrade robusnog<br />
algoritma upravljanja.<br />
• Adaptivno upravljanje<br />
– Uklanjanje razlika u kvaliteti odziva sustava nastalih zbog<br />
promjena parametara sustava predstavlja osnovni cilj kod razrade<br />
adaptivnog algoritma upravljanja.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
• Dinamička analiza sustava upravljanja položajem uz upravljanje<br />
momentom uz korištenje istosmjernih motora<br />
• Promjene parametara zgloba robota<br />
• Zadatak je robusnog i adaptivnog algoritma upravljanja poništiti<br />
djelovanje veličine h, tj. bilo kakve promjene parametara ili bilo<br />
kakvog poremećaja, koji se javlja u sustavu ili djeluje izvana.<br />
63<br />
64
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
• Moguć način kompenzacije h je dodavanje korekcijskog signala na izlaz iz<br />
regulatora:<br />
v je dodatni korekcijski signal<br />
• Treba primijetiti da uvođenje dodatnog upravljačkog signala v podrazumijeva<br />
potpunu kompenzaciju djelovanja sile teže, što povlači za sobom ispuštanje<br />
potrebe za dodatnim signalom estimiranog momenta sile teže (tj. M ge = 0).<br />
• Stoga je nominalni slijedni regulator opisan sljedećom jednadžbom:<br />
• Slijedi da je f upravo onaj zakretni moment kojeg motor treba ostvariti da bi sustav<br />
zadržao zadano, tj. nominalno dinamičko ponašanje<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
• Uz uvjet J ue=J u=J un slijedi da jednadžba signala razlike sustava ima<br />
oblik:<br />
Uz uvjet K pK=1<br />
• Slijedi da korekcijski signal v ima oblik:<br />
• Proračun dodatnog korekcijskog signala v može započeti sljedećim<br />
estimacijskim postupkom:<br />
On se zasniva na ideji da je v upravo ona korekcija<br />
koja osigurava nominalno dinamičko ponašanje<br />
65<br />
66
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
• Blokovska shema upravljanja<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
• Robusnost upravljanja zasniva se na postojanju lokalne petlje<br />
beskonačnog pojačanja čiji ulaz i izlaz su ograničeni realnim<br />
ograničenjima slijednog sustava – ostvaren je uvjet za ostvarenje<br />
točnosti u stacionarnom stanju<br />
67<br />
68
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
Prikaz sheme robusnog upravljanja u obliku sheme adaptivnog upravljanja - signalna<br />
adaptacija<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
Prikaz sheme robusnog upravljanja u obliku sheme adaptivnog upravljanja -<br />
parametarska adaptacija<br />
+ m s<br />
69<br />
oblik v isti je kao i kod signalne adaptacije, jer<br />
se zbog robusnosti m s može zanemariti<br />
70
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Robusno i adaptivno upravljanje položajem uz<br />
upravljanje po momentu – Hsia metoda<br />
Praktična realizacija Hsia regulatora<br />
– Limit izlaza iz regulatora (limit struje)<br />
– Realni derivator u adaptacijskom mehanizmu<br />
– Korištenje signala povratne veze brzine vrtnje<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Regulacijske petlje robotskih sustava CNC tipa<br />
• Blokovska shema slijednog sustava CNC tipa<br />
– Kaskadna regulacija s dvije regulacijske petlje brzine vrtnje<br />
– Vanjska petlja s integralnim regulatorom ili PI regulatorom<br />
– Unutarnja petlja s proporcionalnim regulatorom<br />
• Uz referentni signal brzine vrtnje šalje se i referentni signal<br />
položaja θ r upotrebom interpolatora iz CNC nadzornog računala.<br />
• U svakom intervalu diskretizacije uspoređuje se referentni signal<br />
položaja sa stvarnim položajem, koji je izražen s brojem impulsa<br />
iz inkrementalnog davača impulsa.<br />
• Kada su obje vrijednosti jednake, tada se zglob nalazi u zadanom<br />
položaju i zaustavlja se referentni signal brzine vrtnje.<br />
71<br />
72
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Regulacijske petlje robotskih sustava CNC tipa<br />
• Generiranje reference brzine vrtnje<br />
• U t 1 razlika između zadanog i stvarnog<br />
položaja iznosi e (vidi sliku desno), a regulator<br />
ju otklanja u intervalu između trenutaka t 1 i t 2<br />
• Zadovoljavajuće ponašanje robotskih sustava<br />
CNC tipa dobije se za:<br />
• Vrijednost pojačanja K o podešava se za<br />
maksimalnu očekivanu vrijednost<br />
elektromehaničke vremenske konstante T m ,<br />
koja ovisi o maksimalno očekivanom iznosu<br />
ukupnog momenta inercije J u .<br />
• Za manje vrijednosti ukupnog momenta<br />
inercije koeficijent prigušenja će poprimiti<br />
vrijednosti veće od 0.7.<br />
• Za male momente inercije koeficijenti<br />
prigušenja mogu značajno porasti �<br />
posljedica je veoma trom prijelazni proces i<br />
usporeni radni ciklus robota.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira manipulatora<br />
• Kretanje manipulatora može biti bez ograničenja ili s ograničenjima<br />
• Primjeri ograničenog kretanja:<br />
– gibanje po površini stola (pisanje, brušenje, rezanje)<br />
– guranje i povlačenje pretinaca<br />
– različiti zadaci montaže (umetanje, zavrtanje)<br />
• Razlozi za uvođenje regulacije sile dodira:<br />
– Robotski poslovi (npr. proces brušenja) kod kojih upravljanje po trajektoriji gibanja<br />
nije dovoljno, jer se alat kojim se radi troši pa se nakon nekog vremena, ukoliko se<br />
upravlja samo po trajektoriji gibanja, izgubi kontakt između predmeta i alata,<br />
– Nepoznavanje karakteristika obrađivanog predmeta (npr. hrapavosti i oblika ruba<br />
brušenog predmeta).<br />
– Robotski poslovi za koje je trajektorija zadana uz pretpostavljeno poznavanje radne<br />
okoline robotskog sustava u bilo kojem trenutku gibanja, a kod kojih nepredviđene<br />
promjene u radnoj okolici mogu prouzročiti neplanirani kontakt robota s okolinom.<br />
– Ako postoji samo upravljanje po položaju, tada zbog realno postojećih pogrešaka u<br />
planiranju željene operacije te zbog konačne točnosti regulacijske petlje položaja,<br />
manipulator može udariti i oštetiti sebe ili elemente radne okoline � može se<br />
zaključiti da je u tim slučajevima sustav suviše krut (tj. nedovoljno podatan) –<br />
rješenje može biti dodavanje regulacijskog kruga sile dodira.<br />
73<br />
74
Podatn<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Pisanje po ploči Okretanje ručice<br />
x<br />
z<br />
y<br />
xc<br />
ωc<br />
zc<br />
yc<br />
Prirodna<br />
ograničenja<br />
vx =<br />
f y<br />
vz =<br />
ω x<br />
ω y<br />
τ z<br />
0<br />
= 0<br />
0<br />
= 0<br />
= 0<br />
= 0<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Umetanje klina u rupu<br />
xc<br />
zc<br />
yc<br />
Prirodna<br />
ograničenja<br />
vx =<br />
v y<br />
f z<br />
ω x<br />
ω y<br />
τ z<br />
0<br />
= 0<br />
= 0<br />
= 0<br />
= 0<br />
= 0<br />
Umjetna<br />
ograničenja<br />
f x<br />
= 0<br />
0<br />
z= v<br />
= 0<br />
= 0<br />
= 0<br />
vy =<br />
v d<br />
τ x<br />
τ y<br />
ω z<br />
Umjetna<br />
ograničenja<br />
f x<br />
v y<br />
f z<br />
τ x<br />
τ y<br />
ω d<br />
= 0<br />
= 0<br />
= 0<br />
= 0<br />
= 0<br />
z= ω<br />
75<br />
76
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira manipulatora<br />
• Senzori sile (ugrađuju se u prihvatnice robotske ruke)<br />
– registriraju kontakt i iznos sile kontakta, nakon čega se ovisno o robotskom<br />
sustavu, donosi odluka o akciji � akcija može biti trenutno zaustavljanje<br />
gibanja robota ili isključenje upravljanja po trajektoriji gibanja i uključenje<br />
upravljanja po sili.<br />
• Podatnost kao mjera mekoće dodira<br />
– Pasivna podatnost - podrazumijeva se svojstvo samog manipulatora (npr.<br />
prihvatnica presvučena gumom),<br />
– Aktivna podatnost - podatnost koja se podržava programskom podrškom, tj.<br />
računalom. Prednosti aktivne podatnosti su mogućnost preprogramiranja i<br />
prilagođavanja raznim primjenama.<br />
• Dualnost upravljanja silom i upravljanja položajem<br />
– Ako su osigurani uvjeti slobodnog gibanja po svim osima � dovoljna je samo<br />
regulacija položaja.<br />
– Ako su uvjeti ograničenja prisutni po svim osima � jedino je moguća regulacija sile.<br />
– Između dviju krajnosti, kombinacijom istovremene regulacije položaja i sile, postiže<br />
se tražena podatnost manipulatora.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira manipulatora<br />
Dva osnovna pristupa upravljanju<br />
sile dodira:<br />
• hibridno upravljanje položajem<br />
i silom dodira<br />
– upravljanje položajem, koje<br />
se odvija u vremenu kada<br />
gibanje nije ograničeno<br />
okolinom i upravljanje silom<br />
kada je gibanje ograničeno<br />
okolinom. Upravljanje<br />
položajem odvija se u<br />
tangencijalnoj ravnini, a<br />
upravljanje silom u ravnini<br />
okomitoj na sučeljenu<br />
površinu<br />
• upravljanje impedancijom<br />
manipulatora.<br />
77<br />
78
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira robotskog mehanizma<br />
s jednim stupnjem slobode gibanja<br />
• Senzor sile dodira - montiran<br />
na mjestu korijena šake<br />
• U režimu slobodnog gibanja<br />
po svim osima, mehanizam je<br />
upravljan po položaju<br />
•Uslučaju dodira s okolinom,<br />
upravljan je po sili dodira<br />
• Zglob pogoni vektorski<br />
upravljan čoperski napajan<br />
elektronički komutirani motor<br />
• Kaskadna regulacija – P<br />
regulator položaja/sile, PI<br />
regulator brzine vrtnje i PWM<br />
regulator struje<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Model dodira manipulatora i radne okoline (1 stupanj<br />
slobode gibanja uz translacijsko gibanje vrha alata)<br />
79<br />
80
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Model dodira manipulatora i radne okoline (1 stupanj<br />
slobode gibanja uz translacijsko gibanje vrha alata)<br />
Profil predmeta, tj. poremećajna veličina<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Matematički model regulacijske petlje sile dodira<br />
• Regulacijska petlja struje<br />
– Fazne struje statora reguliraju se pomoću regulatora s impulsno širinskom<br />
modulacijom faznih napona statora<br />
– Tipične vrijednosti frekvencije prekidanja čopera su u rasponu 5 − 20 kHz,<br />
čime se postiže gotovo trenutačno upravljanje strujom.<br />
– Zbog toga se zatvorena strujna petlja vektorski upravljanog sinkronog<br />
motora može opisati sljedećom prijenosnom funkcijom:<br />
• Regulacijska petlja brzine vrtnje<br />
– PI regulator brzine vrtnje:<br />
81<br />
82
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Blokovska shema regulacijska petlje brzine vrtnje<br />
• Prijenosna funkcija otvorene regulacijske petlje brzine vrtnje (bez regulatora)<br />
parametri svedeni na<br />
osovinu motora<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
s<br />
83<br />
• Zadani su sljedeći pokazatelji kvalitete<br />
odziva regulacijske petlje brzine vrtnje:<br />
– σ m =20%, t m =15 ms<br />
• Sinteza parametara regulatora brzine<br />
vrtnje primjenom metode krivulje mjesta<br />
korijena: K R=15, T I=0.03 s<br />
• Pol u ishodištu i pol 1/T M vrlo su blizu<br />
jedan drugoga pa se uslijed odabranog<br />
mjerila teško razlikuju. Iz slike se može<br />
vidjeti da je utjecaj nule gotovo eliminiran<br />
vrlo bliskim polom, tako da je dinamika<br />
sustava određena dominantnim parom<br />
konjugirano kompleksnih polova. Preostali<br />
pol sustava nalazi se vrlo daleko od<br />
ishodišta i njegovo djelovanje je<br />
zanemarivo. Zanemaren je i utjecaj 1/T zi.<br />
84
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odziv signala povratne veze brzine vrtnje pri<br />
skokovitoj promjeni reference.<br />
• Zadani su sljedeći pokazatelji kvalitete<br />
odziva regulacijske petlje brzine vrtnje:<br />
– σ m =20%, t m =15 ms<br />
• Sinteza parametara regulatora brzine<br />
vrtnje primjenom metode krivulje mjesta<br />
korijena: K R=15, T I=0.03 s<br />
• Pol u ishodištu i pol 1/T M vrlo su blizu<br />
jedan drugoga pa se uslijed odabranog<br />
mjerila teško razlikuju. Iz slike se može<br />
vidjeti da je utjecaj nule gotovo eliminiran<br />
vrlo bliskim polom, tako da je dinamika<br />
sustava određena dominantnim parom<br />
konjugirano kompleksnih polova. Preostali<br />
pol sustava nalazi se vrlo daleko od<br />
ishodišta i njegovo djelovanje je<br />
zanemarivo. Zanemaren je i utjecaj 1/T zi.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Postupak sinteze P regulatora sile dodira<br />
85<br />
86
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Postupak sinteze P regulatora sile dodira<br />
• Blokovska shema otvorene regulacijske petlje sile dodira.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Prijenosna funkcija otvorene regulacijske petlje sile dodira uz K F = 1 (bez regulatora)<br />
• Prijenosna funkcija otvorene regulacijske petlje sile dodira nakon<br />
uvrštavanja prijenosnih funkcija G 1 do G 4:<br />
Astatički sustav tipa IT 6<br />
87<br />
88
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Krivulja mjesta korijena regulacijske petlje sile<br />
dodira (gumena površina).<br />
• Zadani su sljedeći pokazatelji kvalitete<br />
odziva regulacijske petlje sile dodira:<br />
– σ m =25%, t m =50 ms<br />
• Sinteza parametara regulatora sile dodira<br />
primjenom metode krivulje mjesta<br />
korijena: K F=0.03<br />
• Polovi, koji su vrlo udaljeni od ishodišta,<br />
zanemareni su zbog neznatnog djelovanja<br />
na dinamičko ponašanje sustava.<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odziv signala sile dodira pri skokovitoj promjeni<br />
reference (gumena površina).<br />
89<br />
Odziv signala povratne veze sile dodira pri skokovitoj<br />
promjeni reference (gumena površina).<br />
90
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
• Primjena metoda robusnog i adaptivnog upravljanja � adaptacija<br />
koeficijenta pojačanja regulatora sile K F<br />
Nestabilan odziv sile za isti K F =0.03<br />
pri promjeni površine (aluminij).<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira preko upravljanja<br />
impedancijom manipulatora<br />
• Impedancija je fizički sustav koji je u stanju prihvatiti ulaznu pobudu<br />
(nalog za gibanje) i odgovoriti s ostvarenim izlaznim učinkom (npr.<br />
silom).<br />
• Robotski manipulator ponaša se kao impedancija, a shodno tome,<br />
radna okolica djeluje kao admitancija, tj. posjeduje suprotna<br />
svojstva.<br />
• Impedancija robotskog manipulatora sastoji se od otpornosti<br />
(trenja), kapacitivnosti (elastičnosti) i inercije (mase), koji su<br />
određeni mehaničkom konstrukcijom manipulatora.<br />
• Parametri impedancije definiraju pasivnu podatnost manipulatora<br />
� npr. umetanjem gumenih dijelova u konstrukciju manipulatora<br />
mijenjat će se pasivna podatnost.<br />
• Upravljani robotski manipulator ponaša se kao aktivna impedancija<br />
� Kod upravljanja impedancijom robota parametri regulatora sile<br />
dodira podešavaju se tako da se uz zadanu konstrukciju robotskog<br />
manipulatora dobije željena podatnost.<br />
91<br />
92
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira preko upravljanja<br />
impedancijom manipulatora<br />
Svrha upravljanja impedancijom je dobivanje<br />
dinamičkog odnosa između pozicije i sile, a ne<br />
upravljanja svakom od tih varijabli posebno:<br />
d<br />
Fa = K s ( xr<br />
− x)<br />
+ bs<br />
( xr<br />
− x)<br />
dt<br />
F a - sila kojom djeluje vrh alata na površinu predmeta,<br />
x - stvarna pozicija vrha alata,<br />
x r - željena pozicija vrha alata,<br />
K s - koeficijent krutosti alata,<br />
b s - koeficijent viskoznosti alata,<br />
x p - površina predmeta,<br />
K e - koeficijent krutosti predmeta.<br />
K s i b s se postavljaju programski<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira preko upravljanja<br />
impedancijom manipulatora<br />
Fp = K e ( x p − x)<br />
F p - sila koju predmet osjeća,<br />
K e - koeficijent krutosti predmeta (određuje se<br />
eksperimentalno),<br />
x p - površina predmeta,<br />
x - pozicija do koje je vrh alata prodro kroz predmet<br />
Položaj vrha alata koji prodire u predmet:<br />
x = x p + Δxa<br />
+ Δx<br />
Δxa<br />
Δx<br />
p<br />
p<br />
- promjena položaja alata prouzrokovana<br />
djelovanjem sile robota na predmet<br />
- promjena profila predmeta prouzrokovana<br />
djelovanjem sile robota na predmet<br />
93<br />
94
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Upravljanje silom dodira preko upravljanja<br />
impedancijom manipulatora<br />
Δx<br />
a<br />
F<br />
=<br />
K s<br />
F<br />
Δx<br />
p =<br />
K e<br />
U stacionarnom stanju (kada je zadana sila<br />
postignuta) pozicija vrha alata se računa na<br />
sljedeći način:<br />
K s xr<br />
+ K e x p<br />
xs<br />
=<br />
K + K<br />
Fr<br />
x =<br />
K e<br />
+<br />
s<br />
e<br />
Mi robotu zadajemo položaj vrha alata x r, a ona<br />
se dobiva na sljedeći način:<br />
K e K e<br />
K e + K s K e<br />
= x − x + x xr = x − x p<br />
K K<br />
K K<br />
xr p<br />
s s<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
U stacionarnom stanju sila je stalna i željeni položaj vrha alata treba<br />
odrediti prema sljedećem izrazu:<br />
K + K<br />
x = ⋅ F + x = K F + x<br />
e s<br />
r<br />
Ke⋅Ks r p Σ r p<br />
Osnovni princip upravljanja impedancijom se svodi na pretpostavku<br />
da se površina okoline u trenutku dodira manipulatora elastično<br />
deformira � pod prepostavkom da je na raspolaganju senzor<br />
položaja dovoljne rezolucije može se mjeriti «prodor» u okolinu �<br />
na temelju tog pomaka uz poznavanje krutosti okoline K e zna se<br />
iznos sile kojom manipulator djeluje na okolinu.<br />
Upravljački zakon upravljanja impedancijom robota ima oblik:<br />
F Ks x Bs dt<br />
s<br />
x<br />
s<br />
p<br />
95<br />
0 x2≤xp dΔx ⎧⎪<br />
= Δ + pri čemu vrijedi: F = ⎨<br />
⎪⎩<br />
K ( x − x ) x > x<br />
e 2 p 2 p<br />
96
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Primjer: Upravljanje silom dodira troosnog planarnog<br />
manipulatora preko upravljanja impedancijom<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Primjer: Upravljanje silom dodira troosnog planarnog<br />
manipulatora preko upravljanja impedancijom<br />
97<br />
98
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Primjer: Upravljanje silom dodira troosnog planarnog<br />
manipulatora preko upravljanja impedancijom<br />
Zakon upravljanja impedancijom robota ima oblik:<br />
dΔd F = KsΔ d + Bs dt<br />
F<br />
pri čemu vrijedi:<br />
⎧⎪ 0 d ≤ dp<br />
= ⎨<br />
⎪⎩<br />
Ke( d − dp) d > dp<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
99<br />
100
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Shema u Matlabu sustava upravljanja pozicijom, brzinom vrtnje i strujom<br />
armature za sva tri motora u zglobovima planarnog manipulatora<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odziv sile dodira pri upravljanju impedancijom<br />
bs<br />
K s<br />
K e<br />
= 100<br />
= 10000<br />
101<br />
=<br />
6000N<br />
/ m<br />
102
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odziv sile dodira pri upravljanju impedancijom – veći K s<br />
bs<br />
= 100<br />
K = 100000<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odziv sile dodira pri upravljanju impedancijom – veći b s<br />
s<br />
K e<br />
b s =<br />
K s<br />
= 6000N<br />
/ m<br />
500<br />
= 10000<br />
103<br />
K =<br />
6000 N / m<br />
e<br />
104
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
Odziv sile dodira pri upravljanju impedancijom – tvrđi predmet<br />
bs<br />
K s<br />
= 100<br />
<strong>Sveučilište</strong> u <strong>Zagrebu</strong>, Fakultet elektrotehnike i računarstva Osnove robotike<br />
Zavod za automatiku i računalno inženjerstvo Predavanja<br />
= 10000<br />
K = 12000 N / m<br />
Odziv sile dodira pri upravljanju impedancijom – tvrđi predmet pomaknut za 1 mm<br />
e<br />
bs<br />
K s<br />
= 100<br />
= 10000<br />
105<br />
K =<br />
12000 N / m<br />
e<br />
106