

Ein viskoelastisches Stoffmodell zur Simulation gummiartiger ...
Ein viskoelastisches Stoffmodell zur Simulation gummiartiger ...
Ein viskoelastisches Stoffmodell zur Simulation gummiartiger ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
3 Algorithmus 13<br />
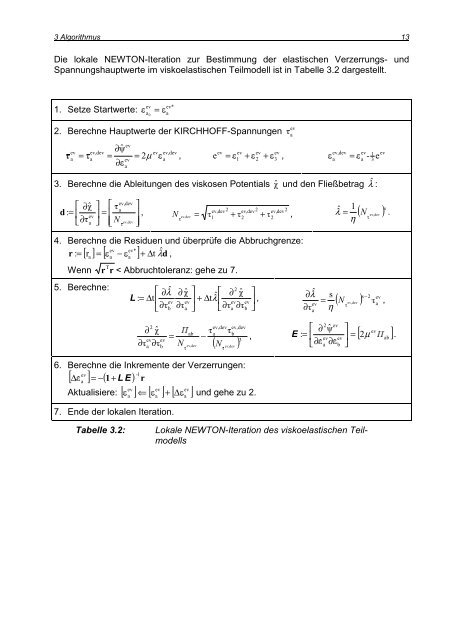
Die lokale NEWTON-Iteration <strong>zur</strong> Bestimmung der elastischen Verzerrungs- und<br />
Spannungshauptwerte im viskoelastischen Teilmodell ist in Tabelle 3.2 dargestellt.<br />
1. Setze Startwerte:<br />
ev<br />
a = 0<br />
ev*<br />
a<br />
2. Berechne Hauptwerte der KIRCHHOFF-Spannungen<br />
ev<br />
a<br />
∂ ˆ<br />
=<br />
ev, dev<br />
a<br />
ev<br />
= ev<br />
∂ a<br />
ev<br />
= 2µ<br />
ev, dev<br />
a ,<br />
ev ev ev<br />
e 1 + 2 +<br />
= ,<br />
3. Berechne die Ableitungen des viskosen Potentials ˆ und den Fließbetrag λ ˆ :<br />
⎡ ev, dev<br />
⎡ ∂ˆ<br />
⎤ ⎤<br />
a<br />
d : = ⎢ ⎥ = ⎢ ⎥ ,<br />
ev<br />
⎣∂<br />
a ⎦ ⎢ ev, dev ⎣ N ⎥⎦<br />
ev<br />
3<br />
ev<br />
a<br />
ev, dev<br />
a<br />
ev, dev2<br />
ev, dev2<br />
ev, dev2<br />
N ev, dev = 1 + 2 + 2 , ( ) s<br />
ˆ 1<br />
λ = N ev, dev .<br />
η<br />
4. Berechne die Residuen und überprüfe die Abbruchgrenze:<br />
r λˆ : = r =<br />
ev<br />
−<br />
ev*<br />
+ ∆t<br />
,<br />
[ ] [ ] d<br />
a<br />
a<br />
a<br />
Wenn r r<br />
T < Abbruchtoleranz: gehe zu 7.<br />
5. Berechne:<br />
⎡ ∂ ˆ<br />
2<br />
λ ∂ ˆ ⎤ ⎡ ∂ ˆ ⎤<br />
L : = ∆t⎢<br />
⎥ + ∆t<br />
ˆ λ<br />
ev ⎢ ev ev ⎥ ,<br />
ev<br />
⎣∂<br />
b ∂ a ⎦ ⎣∂<br />
a ∂ b ⎦<br />
2<br />
∂ ˆ<br />
∂ ∂<br />
ev<br />
a<br />
ev<br />
b<br />
=<br />
N<br />
ab<br />
ev, dev<br />
−<br />
ev, dev<br />
a<br />
ev, dev<br />
b<br />
( ) 3<br />
N ev, dev<br />
6. Berechne die Inkremente der Verzerrungen:<br />
ev<br />
-1<br />
[ ∆ a ] = −(<br />
1 + L E)<br />
r<br />
ev<br />
⇐<br />
ev<br />
+ ∆<br />
ev<br />
und gehe zu 2.<br />
Aktualisiere: [ ] [ ] [ ]<br />
7. Ende der lokalen Iteration.<br />
a<br />
a<br />
a<br />
,<br />
∂ ˆ λ s<br />
=<br />
∂ η<br />
ev<br />
a<br />
=<br />
ev<br />
a<br />
-<br />
1<br />
3<br />
e<br />
s−<br />
2 ev<br />
( N ev, dev )<br />
a<br />
ev<br />
,<br />
ev [ 2 ]<br />
2 ev ⎡ ∂ ˆ ⎤<br />
E : = ⎢ = µ<br />
ev ev ⎥<br />
ab .<br />
⎣∂<br />
a ∂ b ⎦<br />
Tabelle 3.2: Lokale NEWTON-Iteration des viskoelastischen Teilmodells













