Vergleich zweier Messverfahren zur ... - RWTH Aachen University
Vergleich zweier Messverfahren zur ... - RWTH Aachen University
Vergleich zweier Messverfahren zur ... - RWTH Aachen University

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
4 Material und Methode<br />
4.1 Material<br />
Zur besseren Übersicht wurde versucht, den Studienaufbau in den präoperativen<br />
Ablauf, die folgende operative Durchführung und die postoperativen Maßnahmen zu<br />
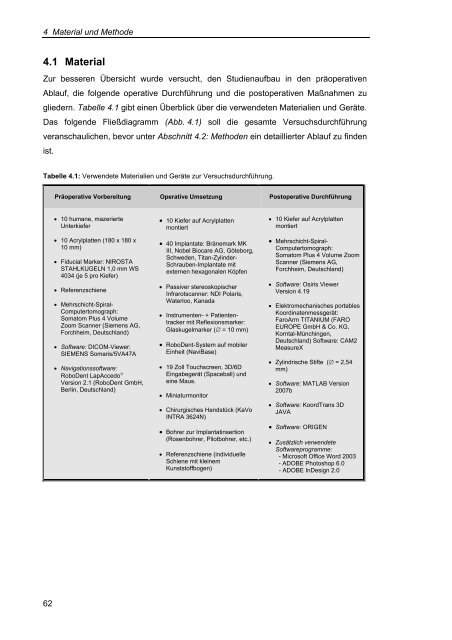
gliedern. Tabelle 4.1 gibt einen Überblick über die verwendeten Materialien und Geräte.<br />
Das folgende Fließdiagramm (Abb. 4.1) soll die gesamte Versuchsdurchführung<br />
veranschaulichen, bevor unter Abschnitt 4.2: Methoden ein detaillierter Ablauf zu finden<br />
ist.<br />
Tabelle 4.1: Verwendete Materialien und Geräte <strong>zur</strong> Versuchsdurchführung.<br />
62<br />
Präoperative Vorbereitung<br />
� 10 humane, mazerierte<br />
Unterkiefer<br />
� 10 Acrylplatten (180 x 180 x<br />
10 mm)<br />
� Fiducial Marker: NIROSTA<br />
STAHLKUGELN 1,0 mm WS<br />
4034 (je 5 pro Kiefer)<br />
� Referenzschiene<br />
� Mehrschicht-Spiral-<br />
Computertomograph:<br />
Somatom Plus 4 Volume<br />
Zoom Scanner (Siemens AG,<br />
Forchheim, Deutschland)<br />
� Software: DICOM-Viewer:<br />
SIEMENS Somaris/5VA47A<br />
� Navigationssoftware:<br />
RoboDent LapAccedo �<br />
Version 2.1 (RoboDent GmbH,<br />
Berlin, Deutschland)<br />
Operative Umsetzung<br />
� 10 Kiefer auf Acrylplatten<br />
montiert<br />
� 40 Implantate: Brånemark MK<br />
III, Nobel Biocare AG, Göteborg,<br />
Schweden, Titan-Zylinder-<br />
Schrauben-Implantate mit<br />
externen hexagonalen Köpfen<br />
� Passiver stereoskopischer<br />
Infrarotscanner: NDI Polaris,<br />
Waterloo, Kanada<br />
� Instrumenten- + Patiententracker<br />
mit Reflexionsmarker:<br />
Glaskugelmarker (� = 10 mm)<br />
� RoboDent-System auf mobiler<br />
Einheit (NaviBase)<br />
� 19 Zoll Touchscreen, 3D/6D<br />
Eingabegerät (Spaceball) und<br />
eine Maus.<br />
� Miniaturmonitor<br />
� Chirurgisches Handstück (KaVo<br />
INTRA 3624N)<br />
� Bohrer <strong>zur</strong> Implantatinsertion<br />
(Rosenbohrer, Pilotbohrer, etc.)<br />
� Referenzschiene (individuelle<br />
Schiene mit kleinem<br />
Kunststoffbogen)<br />
Postoperative Durchführung<br />
� 10 Kiefer auf Acrylplatten<br />
montiert<br />
� Mehrschicht-Spiral-<br />
Computertomograph:<br />
Somatom Plus 4 Volume Zoom<br />
Scanner (Siemens AG,<br />
Forchheim, Deutschland)<br />
� Software: Osiris Viewer<br />
Version 4.19<br />
� Elektromechanisches portables<br />
Koordinatenmessgerät:<br />
FaroArm TITANIUM (FARO<br />
EUROPE GmbH & Co. KG,<br />
Korntal-Münchingen,<br />
Deutschland) Software: CAM2<br />
MeasureX<br />
� Zylindrische Stifte (� = 2,54<br />
mm)<br />
� Software: MATLAB Version<br />
2007b<br />
� Software: KoordTrans 3D<br />
JAVA<br />
� Software: ORIGEN<br />
� Zusätzlich verwendete<br />
Softwareprogramme:<br />
- Microsoft Office Word 2003<br />
- ADOBE Photoshop 6.0<br />
- ADOBE InDesign 2.0