

KR QUANTEC K ultra - KUKA Robotics
KR QUANTEC K ultra - KUKA Robotics
KR QUANTEC K ultra - KUKA Robotics

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
6 Planung<br />
Bei den Verbindungsleitungen ist immer ein Schutzleiter erforderlich,<br />
um eine niederohmige Verbindung entsprechend DIN EN 60204 zwischen<br />
Roboter und Steuerschrank herzustellen. Der Schutzleiter ist<br />
nicht Bestandteil des Lieferumfangs und kann als Option bestellt werden.<br />
Der Anschluss muss kundenseitig vorgenommen werden. Die Gewindebohrungen<br />
zum Anschluss des Schutzleiters befinden sich am Grundgestell des<br />
Roboters.<br />
Bei der Planung und Verlegung der Verbindungsleitungen sind folgende<br />
Punkte zu beachten:<br />
• Der Biegeradius für feste Verlegung bei Motorleitung von 150 mm und bei<br />
Datenleitung von 60 mm darf nicht unterschritten werden.<br />
• Leitungen vor mechanischen Einwirkungen schützen<br />
• Leitungen belastungsfrei verlegen, keine Zugkräfte auf die Stecker<br />
• Leitungen nur im Innenbereich verlegen<br />
• Temperaturbereich (fest verlegt) 263 K (-10 °C) bis 343 K (+70 °C) beachten<br />
• Leitungen getrennt nach Motor- und Datenleitungen in Blechkanälen verlegen,<br />
bei Bedarf zusätzliche EMV-Maßnahmen ergreifen.<br />
Schnittstelle<br />
Energiezuführung<br />
Der Roboter kann mit einer Energiezuführung zwischen Achse 1 bis Achse 3<br />
und einer zweiten Energiezuführung zwischen Achse 3 bis 6 ausgestattet werden.<br />
Die hierzu erforderliche Schnittstelle A1 befindet sich an der Rückseite<br />
des Grundgestells, die Schnittstelle A3 seitlich am Arm und die für Achse 6 am<br />
Werkzeug des Roboters. Je nach Anwendungsfall sind die Schnittstellen unterschiedlich<br />
in Ausführung und Umfang. Sie können z. B. mit Anschlüssen für<br />
Schlauch- und Elektroleitungen belegt sein. Detaillierte Informationen zu Steckerbelegung,<br />
Anschlussgewinde u. ä. sind in eigenen Dokumentationen zu<br />
finden.<br />
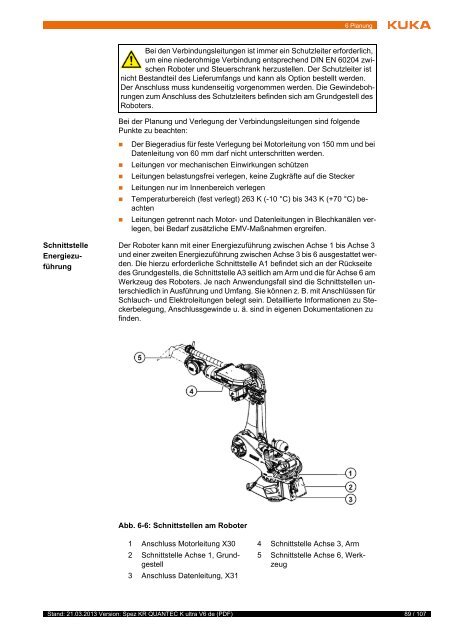
Abb. 6-6: Schnittstellen am Roboter<br />
1 Anschluss Motorleitung X30 4 Schnittstelle Achse 3, Arm<br />
2 Schnittstelle Achse 1, Grundgestell<br />
3 Anschluss Datenleitung, X31<br />
5 Schnittstelle Achse 6, Werkzeug<br />
Stand: 21.03.2013 Version: Spez <strong>KR</strong> <strong>QUANTEC</strong> K <strong>ultra</strong> V6 de (PDF)<br />
89 / 107














