

FORTSCHRITT-· BERICHTE
FORTSCHRITT-· BERICHTE
FORTSCHRITT-· BERICHTE

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
96 Realisierung des Meßsystems<br />
Frequenz f/2 auf die Versorgurtgsspannung oder die Spannungsreferenz. Eine Offsetspannung<br />
führt zu einem vermehrten Auftreten der Bitkombination 00 oder 11. Da die<br />
Bits mit fa getaktet werden, entsteht im Ausgangsspektrum des Modulators eine Linie in<br />
der Nähe von f/2. Bei einer Einstreuung von f/2 auf die Versorgung oder die Referenz,<br />
kommt es zu Interferenzen zwischen den beiden Störsignalen. Die Differenzfrequenz der<br />
beiden Signale kann noch im Durchlaßbereich des Tiefpaßfilters liegen. Dann kommt es<br />
zu einem Störprodukt am Modulatorausgang.<br />
Realisierung des Meßsystems<br />
2<br />
V<br />
or-11~1--r~t---f---\~-f---+~-l---+-~L-_J__<br />
97<br />
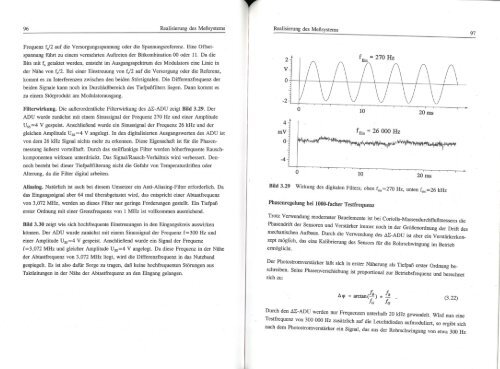
Filterwirkung. Die außerordentliche Filterwirkung des AE-ADU zeigt Bild 3.29. Der<br />
ADU wurde zunächst mit einem Sinussignal der Frequenz 270 Hz und einer Amplitude<br />
U 55 =4 V gespeist. Anschließend wurde ein Sinussignal der Frequenz 26 kHz und der<br />
gleichen Amplitude Uss =4 V angelegt. In den digitalisierten Ausgangswerten des ADU ist<br />
von dem 26 kHz Signal nichts mehr zu erkennen. Diese Eigenschaft ist für die Phasenmessung<br />
äußerst vorteilhaft. Durch das steilflankige Filter werden höherfrequente Rauschkomponenten<br />
wirksam unterdrückt. Das Signal/Rausch-Verhältnis wird verbessert. Dennoch<br />
besteht bei dieser Tiefpaßfilterung nicht die Gefahr von Temperaturdriften oder<br />
Alterung, da die Filter digital arbeiten.<br />
4<br />
mV<br />
0<br />
-4<br />
0<br />
10 20ms<br />
fEin = 26 Q()() Hz<br />
10 20ms<br />
Aliasing. Natürlich ist auch bei diesem Umsetzer ein Anti-Aliasing-Filter erforderlich. Da<br />
das Eingangssignal aber 64 mal überabgetastet wird, das entspricht einer Abtastfrequenz<br />
von 3,072 MHz, werden an dieses Filter nur geringe Forderungen gestellt. Ein Tiefpaß<br />
erster Ordnung mit einer Grenzfrequenz von 1 MHz ist vollkommen ausreichend.<br />
Bild 3.30 zeigt wie sich hochfrequente Einstreuungen in den Eingangskreis auswirken<br />
können. Der ADU wurde zunächst mit einem Sinussignal der Frequenz f=300 Hz und<br />
einer Amplitude U 55 =4 V gespeist. Anschließend wurde ein Signal der Frequenz<br />
f=3,072 MHz und gleicher Amplitude U 55 =4 V angelegt. Da diese Frequenz in der Nähe<br />
der Abtastfrequenz von 3,072 MHz liegt, wird die Differenzfrequenz in das Nutzband<br />
gespiegelt. Es ist also dafür Sorge zu tragen, daß keine hochfrequenten Störungen aus<br />
Taktleitungen in der Nähe der Abtastfrequenz an den Eingang gelangen.<br />
Bild 3.29 Wirkung des digitalen Filters; oben fein =270 Hz, un_ten fein =26 kHz<br />
Phasenregelung bei 1000-facher Testfrequenz<br />
Trotz Verwendung modernster Bauelemente ist_bei Coriolis-Massendurchflußmessern die<br />
Phasen~rift der Sensoren und Verstärker immer noch in der Größenordnung der Drift des<br />
mecharus:hen Aufbaus. Durch die Verwendung des AE-ADU ist aber ein Verstärkerkonzept<br />
möglich, das eine Kalibrierung des Sensors für die Rohrschwingung im Betrieb<br />
ermöglicht.<br />
Der ~hotostr~mverstärker läßt sich in erster Näherung als Tiefpaß erster Ordnung bes~hre1ben<br />
. Seme Phasenverschiebung ist proportional zur Betriebsfrequenz und berechnet<br />
sich zu:<br />
.1 q> = arctan (IB )