

antriebstechnik 12/2017
antriebstechnik 12/2017
antriebstechnik 12/2017
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
16<br />
1<br />
0.5<br />
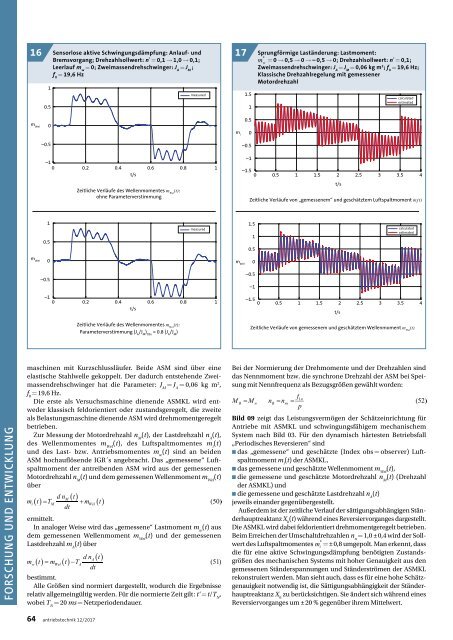
Sensorlose aktive Schwingungsdämpfung: Anlauf- und<br />
Bremsvorgang; Drehzahlsollwert: n * = 0,1 → 1,0 → 0,1;<br />
Leerlauf m w<br />
= 0; Zweimassendrehschwinger: J A<br />
= J M<br />
;<br />
f 0<br />
= 19,6 Hz<br />
measured<br />
17<br />
1.5<br />
1<br />
Sprungförmige Laständerung: Lastmoment:<br />
= 0 → 0,5 → 0 → – 0,5 → 0; Drehzahlsollwert: n * = 0,1;<br />
Zweimassendrehschwinger: J A<br />
= J M<br />
= 0,06 kg m 2 ; f 0<br />
= 19,6 Hz;<br />
Klassische Drehzahlregelung mit gemessener<br />
Motordrehzahl<br />
calculated<br />
estimated<br />
m Wel<br />
0<br />
m i<br />
0.5<br />
0<br />
–0.5<br />
–0.5<br />
–1<br />
0 0.2 0.4 0.6 0.8 1<br />
t/s<br />
–1<br />
–1.5<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
t/s<br />
Zeitliche Verläufe des Wellenmomentes m Wel<br />
(t):<br />
ohne Parameterverstimmung<br />
Zeitliche Verläufe von „gemessenem“ und geschätztem Luftspaltmoment m i<br />
(t)<br />
1<br />
0.5<br />
measured<br />
1.5<br />
1<br />
0.5<br />
calculated<br />
estimated<br />
m Wel<br />
0<br />
m Wel<br />
0<br />
–0.5<br />
–0.5<br />
–1<br />
–1<br />
0 0.2 0.4 0.6 0.8 1<br />
t/s<br />
–1.5<br />
0 0.5 1 1.5 2 2.5 3 3.5 4<br />
t/s<br />
Zeitliche Verläufe des Wellenmomentes m Wel<br />
(t):<br />
Parameterverstimmung (J A<br />
/J M<br />
) Obs<br />
= 0.8 (J A<br />
/J M<br />
)<br />
Zeitliche Verläufe von gemessenem und geschätztem Wellenmoment m Wel<br />
(t)<br />
maschinen mit Kurzschlussläufer. Beide ASM sind über eine<br />
elas tische Stahlwelle gekoppelt. Der dadurch entstehende Zweimassendrehschwinger<br />
hat die Parameter: J M<br />
= J A<br />
= 0,06 kg m 2 ,<br />
f 0<br />
= 19,6 Hz.<br />
Die erste als Versuchsmaschine dienende ASMKL wird entweder<br />
klassisch feldorientiert oder zustandsgeregelt, die zweite<br />
als Belastungsmaschine dienende ASM wird drehmomentgeregelt<br />
betrieben.<br />
Zur Messung der Motordrehzahl n M<br />
(t), der Lastdrehzahl n A<br />
(t),<br />
des Wellenmomentes m Wel<br />
(t), des Luftspaltmomentes m i<br />
(t)<br />
und des Last- bzw. Antriebsmomentes m w<br />
(t) sind an beiden<br />
ASM hochauflösende IGR´s angebracht. Das „gemessene“ Luftspaltmoment<br />
der antreibenden ASM wird aus der gemessenen<br />
Motordrehzahl n M<br />
(t) und dem gemessenen Wellenmoment m Wel<br />
(t)<br />
über<br />
ermittelt.<br />
In analoger Weise wird das „gemessene“ Lastmoment m w<br />
(t) aus<br />
dem gemessenen Wellenmoment m Wel<br />
(t) und der gemessenen<br />
Lastdrehzahl m A<br />
(t) über<br />
bestimmt.<br />
Alle Größen sind normiert dargestellt, wodurch die Ergebnisse<br />
relativ allgemeingültig werden. Für die normierte Zeit gilt: t‘ = t/T N<br />
,<br />
wobei T N<br />
= 20 ms = Netzperiodendauer.<br />
Bei der Normierung der Drehmomente und der Drehzahlen sind<br />
das Nennmoment bzw. die synchrone Drehzahl der ASM bei Speisung<br />
mit Nennfrequenz als Bezugsgrößen gewählt worden:<br />
Bild 09 zeigt das Leistungsvermögen der Schätzeinrichtung für<br />
Antriebe mit ASMKL und schwingungsfähigem mechanischem<br />
System nach Bild 03. Für den dynamisch härtesten Betriebsfall<br />
„Periodisches Reversieren“ sind<br />
n das „gemessene“ und geschätzte (Index obs = observer) Luftspaltmoment<br />
m i<br />
(t) der ASMKL,<br />
n das gemessene und geschätzte Wellenmoment m Wel<br />
(t),<br />
n die gemessene und geschätzte Motordrehzahl n M<br />
(t) (Drehzahl<br />
der ASMKL) und<br />
n die gemessene und geschätzte Lastdrehzahl n A<br />
(t)<br />
jeweils einander gegenübergestellt.<br />
Außerdem ist der zeitliche Verlauf der sättigungsabhängigen Ständerhauptreaktanz<br />
X h<br />
(t) während eines Reversiervorganges dargestellt.<br />
Die ASMKL wird dabei feldorientiert drehmomentgeregelt betrieben.<br />
Beim Erreichen der Umschaltdrehzahlen n u<br />
= 1,0 ± 0,4 wird der Sollwert<br />
des Luftspaltmomentes = ± 0,8 umgepolt. Man erkennt, dass<br />
die für eine aktive Schwingungsdämpfung benötigten Zustandsgrößen<br />
des mechanischen Systems mit hoher Genauigkeit aus den<br />
gemessenen Ständerspannungen und Ständerströmen der ASMKL<br />
rekonstruiert werden. Man sieht auch, dass es für eine hohe Schätzgenauigkeit<br />
notwendig ist, die Sättigungsabhängigkeit der Ständerhauptreaktanz<br />
X h<br />
zu berücksichtigen. Sie ändert sich während eines<br />
Reversiervorganges um ± 20 % gegenüber ihrem Mittelwert.<br />
64 <strong>antriebstechnik</strong> <strong>12</strong>/<strong>2017</strong>














